ВВЕДЕНИЕ
Особенности вертолета как летательного аппарата
Вертолет является летательным аппаратом тяжелее воздуха. Основное отличие вертолета от самолета заклю- чается в том, что необходимая для его полета подъемная сила создается не крылом, а несущим винтом. У вертолета мощность от поршневого или турбовинтового двигателя передается на несущий винт, который, помимо подъемной силы, создает силы и моменты, необходимые для поступательного перемещения вертолета и управле- ния им.
Вертолеты могут:
— отрываться от земли вертикально вверх без предварительного разбега;
— неподвижно висеть над назначенным пунктом;
— перемещаться в любом направлении: вперед, в сторону, назад;
— снижаться вертикально вниз и совершать посадку без пробега.
В случае отказа двигателя вертолет способен совершить посадку на режиме самовращения (авторотации)
несущего винта.
Вертолеты нашли широкое применение в военной и гражданской авиации.
В военном деле вертолеты применяются для десантирования и перевозки войск, боевой техники, для раз- ведки и борьбы с подводными лодками, проведения спасательных операций, для связи, корректировки артилле- рийской стрельбы и т. д.
В гражданской авиации вертолеты применяются для транспортных и пассажирских перевозок, транспортировки больных, почтовой связи, для производства монтажных работ, для борьбы с вредителями посевов, разведки и борьбы с лесными пожарами, морской разведки рыбы и др.
Наряду с достоинствами вертолеты имеют и недостатки, которые несколько ограничивают их применение. Наиболее существенными недостатками вертолета являются сравнительно малые скорости и дальности полета.
Несмотря на эти недостатки, области применения вертолетов непрерывно расширяются.
Из истории развития вертолетостроения
Вертолетостроение — сравнительно молодая отрасль авиационной промышленности. Она начала быстро раз- виваться лишь после второй мировой войны. До этого времени единственным видом летательного аппарата, который серийно производился промышленностью, был самолет, несмотря на то что идея создания вертолета возникла намного раньше появления самолета. Еще на рубеже XV и XVI веков гениальный итальянский художник и ученый Леонардо да Винчи, наблюдая полет птиц, пришел к выводу о возможности полета человека на аппарате, поддерживаемом в воздухе аэродинамической силой винта.
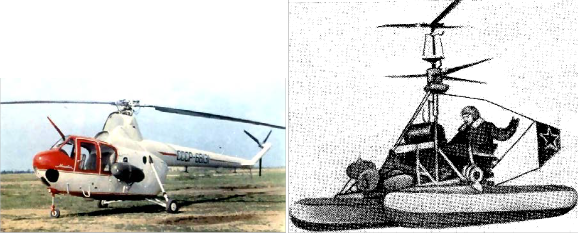
Первые опыты по созданию вертолета были проведены в нашей стране великим русским ученым М. В. Ломо- носовым, который 4 февраля 1754г. на заседании Петербургской Академии наук демонстрировал модель изобретенного им прообраза современного вертолета. Модель имела два четырёхлопастных винта, приводимых. во вращение пружиной (рис. 0.1).
В пр ошл ом с т о лет ии и зв ес тны й рус с к ий у чен ый А. Н. Ладыгин обстоятельно разработал теорию при- менения электрического двигателя для летательных аппаратов и в 1869г. представил на рассмотрение проект электролета.
Коренной перелом в решении проблемы вертолета наступил в начале XX века благодаря работам великого русс ког о уче ног о Н. Е. Жук овс ког о. Тр уд ы Н. Е. Жуковского «Теория гребного винта с большим числом лопастей» (1907г .), «Теоретические основы воздухоплавания» (1910—1912гг.), «Вихревая теория гребного винта» (1912—1915 гг.) до настоящего времени не утратили своего значения и представляют теоретические основы современного вертолетостроения.
Рис. 1. Модель вертолета М. В. Ломоносова
На о сно ве раб от Н. Е. Жук овс ког о е го уч ени к Б. Н. Юрьев в 1909—1912гг. спроектировал и построил оригинальный вертолет одновинтовой схемы (рис. 0.2). На вертолете был установлен автомат перекоса, являющийся и сейчас обязательным механизмом в органах управления почти на всех вертолетах мира. По одновинтовой схеме, предложенной Б. Н. Юрьевым, строится до настоящего времени большинство отечественных и зарубежных вертолетов. На международной выставке в 1912г. за разработанный проект вертолета конструктор был удостоен золотой медали.
Рис. 0.2. Вертолет Б. Н. Юрьева
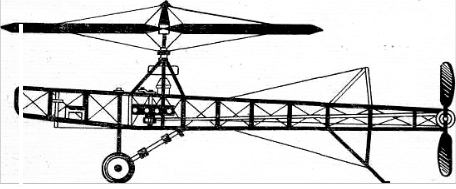
Рис. 0.3. Первый советский вертолет ЦАГИ-1ЭА
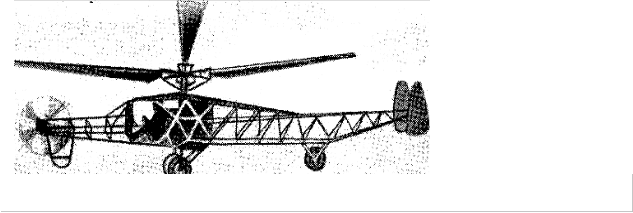
Практически проблему создания вертолета в нашей стране удалось разрешить после победы Великой Ок- тябрьской социалистической революции, когда перед учеными открылись широкие возможности для претворения в жизнь своих идей. При ЦАГИ был создан отдел, проводивший широкие теоретические и экспериментальные работы, на базе которых был создан первый советский вертолет ЦАГИ-1ЭА (рис. 0.3).
Это был первый в мире вертолет, совершивший длительные полеты и у стано ви вший ряд миров ых ре корд ов.
В 1933г. появились вертолеты 3-ЭА и 5-ЭА. В 1935— 1936 гг. был построен вертолет ЦАГИ-ПЭАПВ, снабженный несущим и тянущими винтами (рис. 0.4).
Академик Б. Н. Юрьев и конструктор Братухин И. П. в 1939—1941 гг. спроектировали и построили двухвин- товой вертолет «Омега» (рис. 0.5), имевший хорошие летные данные. Авторы проекта были удостоены Го- сударственной премии.
В 1949 г. начинается серийное производство легкого вертолета Ми-1 конструкции М. Л. Миля (рис. 0.6), затем вертолетов Ка-10 (рис. 0.7), Ка-18 (рис. 0.8) конструкции Н. И. Камова, вертолетов Ми-4 конструкции М. Л. Миля (рис. 0.9) и Як-24 конструкции А. С. Яковлева (рис. 0.10).
Настоящий период развития вертолетостроения в нашей стране знаменует переход от вертолетов с порш- невыми двигателями к вертолётам с турбовинтовыми двигателями. Применение турбовинтовых двигателей, значительно меньших по габаритам и более легких, чем поршневые, позволяет существенно улучшить летные данные и увеличить грузоподъёмность вертолетов.
В 1957г. был испытан и нашёл широкое распространение вертолет Ми-6 с двумя мощными турбовинтовыми двигателями, способный поднять в воздух груз весом до 12 т (рис. 0.11).
Рис. 0.5. Вертолет «Омега» Рис. 0.4. Вертолет ЦАГИ-ПЭАПВ
 Рис. 0.6. Вертолет Ми-1 Рис. 0.7. Вертолет Ка-10
Рис. 0.6. Вертолет Ми-1 Рис. 0.7. Вертолет Ка-10
Вертолеты имеют оборудование, обеспечивающее полеты в любых метеорологических условиях.

Вертолёт Ми-8Т Рис.0.8. Вертолёт Ка-27

Рис. 0.9. Вертолет Ми-4 Рис. 0.10. Вертолет Як 24

Рис. 0.11. Вертолет Ми-6
Устройст во и п ринци п по лета вер толета Вертолет одновинтовой схемы состоит из следующих основных частей: несущего и рулевого винтов, фюзеляжа, силовой установки, трансмиссии, системы управления, взлетно-посадочного устройства (рис.0.14). Кроме того, вертолет имеет различное оборудование для обеспечения полетов.
Несущий в и н т служит для поддержания и перемещения вертолета в воздухе. При вращении в гори зонтальной плоскости несущий винт создает тягу, направленную вверх.
1 — несущий винт; 2 — рулевой винт; 3 — трансмиссия; 4 — шасси; 5 — силовая установка; 6 — фюзеляж; 7 — органы управления
Когда тяга несущего винта будет больше веса вертолета, вертолет без разбега оторвется от земли и начнет вертикальный набор высоты. При равенстве веса вертолета и тяги несущего винта вертолет будет неподвижно висеть в воздухе.
Для вертикального снижения достаточно тягу несущего винта сделать несколько меньше веса вертолета.
Поступательное движение вертолета обеспечивается наклоном плоскости вращения несущего винта при помощи системы управления винтом. Наклон плоскости вращения винта вызывает соответствующий наклон полной
аэродинамической силы, при этом ее вертикальная составляющая будет удерживать вертолет в воздухе, а горизонтальная — вызывать поступательное перемещение вертолета в соответствующем направлении.
Р у л е в о й в и н т служит для уравновешивания реактивного момента, возникающего при вращении несущего винта, и для путевого управления вертолетом. Реактивный момент стремится развернуть вертолет в сторону, противоположную вращению несущего винта. Сила тяги рулевого винта создает момент относительно центра тяжести вертолета, уравновешивающий реактивный момент несущего винта. Для разворота вертолета достаточно изменить величину тяги рулевого винта.
Ф ю з е л я ж вертолета служит для размещения экипажа, грузов, силовой установки и систем, взлетно-по- садочного устройства и крыла (на некоторых вертолетах крыло устанавливается с целью увеличения макси- мальной скорости полета за счет частичной разгрузки несущего винта).
С и л о в а я у с т а н о в к а является источником механической энергии для приведения во вращение несущего и рулевого винтов. Она включает в себя двигатели и системы, обеспечивающие их работу (топливную, масляную, систему охлаждения, систему запуска двигателей и др.).
Т р а н с м и с с и я служит для передачи мощности от двигателя к несущему и рулевому винтам. Составными элементами трансмиссии являются валы, редукторы и муфты.
С и с т е м ы у п р а в л е н и я вертолета состоят из ручного и ножного управления. Они включают командные рычаги (ручку управления, рычаг «шаг — газ» и педали) и системы проводки к несущему и рулевому винтам. Управление несущим винтом производится при помощи специального устройства, называемого автоматом перекоса. Управление рулевым винтом производится от педалей.
В з л ё т н о - п о с а д о ч н ы е у с т р о й с т в а служат опорой вертолета при стоянке и обеспечивают переме- щение вертолета по земле, взлет и посадку. Для смягчения толчков и ударов они снабжены амортизаторами. Взлетно-посадочные устройства могут выполняться в виде колесного шасси, поплавков и лыж.
Классификация вертолетов В основу классификации вертолетов берется количество несущих винтов и их расположение на вертолете. Различают следующие основные типы вертолетов.
В е р т о л ё т ы од н о в и н т о в о й с х е м ы. Вертолеты с одним несущим винтом (рис. 0.6; 0.9; 0.11; 0.12; 0.13) получили наиболее широкое распространение из-за простоты конструкции. Недостатком этой схемы является необходимость установки рулевого винта, на вращение которого расходуется до 10% мощности двигателя.
 Д в у х в и н т о в ы е в е р т о л е т ы продольной схемы. На вертолете продольной схемы (рис. 0.10) не- сущие винты расположены по продольной оси фюзеляжа. Возникающие реактивные моменты от несущих винтов уравновешивают друг друга вращением винтов в противоположные стороны.
Д в у х в и н т о в ы е в е р т о л е т ы продольной схемы. На вертолете продольной схемы (рис. 0.10) не- сущие винты расположены по продольной оси фюзеляжа. Возникающие реактивные моменты от несущих винтов уравновешивают друг друга вращением винтов в противоположные стороны.
Двухвинтовые вертолеты продольной схемы также получили распространение. Основными недостатками данной схемы являются сложность трансмиссии и вредное влияние переднего несущего винта на работу заднего.
Д в у х в и н т о в ы е ве рт оле ты поперечной схемы. На вертолетах этой схемы (рис. 0.5) н есущие винты расположены на его поперечной оси (разнесены), что способствует устранению вредного взаимовлияния винтов. Реактивные моменты уравновешиваются за счет
есущие винты расположены на его поперечной оси (разнесены), что способствует устранению вредного взаимовлияния винтов. Реактивные моменты уравновешиваются за счет
вращения несущих винтов в разные стороны. К недостаткам этой схемы можно отнести несколько больший вес вертолета.
Д в у х в и н т о в ы е верт оле ты с перек рещи в а ю щ и м и с я в и н т а м и . Эти вертолеты (рис. 0.15)
имеют несущие винты, расположенные по бокам фюзеляжа. Лопасти одного винта проходят над втулкой соседнего винта вследствие наклона осей винтов во внешние стороны.
 Сравнительно простая конструкция трансмиссии и незначительные габариты делают эту схему перспективной при создании легких и средних вертолетов. Недостатком данной схемы является неполное уравновешивание винтами реактивных моментов.
Сравнительно простая конструкция трансмиссии и незначительные габариты делают эту схему перспективной при создании легких и средних вертолетов. Недостатком данной схемы является неполное уравновешивание винтами реактивных моментов.
Д в у х в и н т о в ы е в е р т о л е т ы с о о с н о й схе мы. На вертолетах соосной схемы (рис. 0.7 и 0.8) два
несущих винта, вращающиеся в разные стороны, установлены на одной оси. Вертолеты данной схемы очень компактны и обладают сравнительно неплохими летными данными. Недостатками данной схемы является сложность привода и системы управления несущими винтами.
М н о г о в и н т о в ы е вертолеты. Для сверхтяжелых вертолетов (рис. 0.16) наиболее выгодной яв- ляется многовинтовая схема. Количество несущих винт ов мож ет быт ь четыре и бо лее. Бол ьшой вес и
сложность конструкции ограничивают в настоящее время возможности применения вертолетов этой схемы.
В е р т о л ё т ы с р е а к т и в н ы м п р и в о д о м несущ его в и н т а . У ве ртоле тов с р еактив ным приво дом
(рис. 0.17) несущий винт вращается на оси за счет сил реакции газов, вытекающих из насадков, расположенных на концах лопастей.
Применение реактивного привода не требует уравновешивания реактивного момента, так как такого момента нет. Крутящий момент несущий винт получает от привода, установленного непосредственно на его лопастях. Малый вес силовой установки и отсутствие трансмиссии делают эту схему перспективной. Недостатками вертолетов данной схемы являются большой расход топлива и более сложная конструкция лопасти.
РАЗДЕЛ I ОСНОВЫ АЭРОДИНАМИКИ ВЕРТОЛЕТА
Г л а в а 1
ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ ПО АЭРОДИНАМИКЕ
§ 1. Предмет аэродинамики
А э р о д и н а м и к о й называется наука о силах, возникающих при движении тел в воздухе. Этот термин (от греческих слов: аэр — воздух, динамис — сила) появился в конце XIX века. Возникновение новой науки было связано со стремлением человека осуществить полеты на аппаратах тяжелее воздуха. Создание А. Ф. Мо- жайским в 1882г. первого в мире самолета и последующее развитие авиации вызвали быстрое развитие авиа- ционных наук, в том числе и аэродинамики. Основателями аэродинамики являются наши соотечественники Н. Е. Жу ковски й и С . А. Чаплыги н.
При движении тел в воздухе возникают силы, называемые аэродинамическими. Их образование связано не только с движущимся телом, но и с определенными свойствами воздуха.
§ 2. Строение атмосферы
Воздух, образующий атмосферу земли, представляет смесь газов, главным образом азота и кислорода (у земли: азота по объему 78%, кислорода 21% и других газов 1%). Воздух состоит из молекул, которые находятся в неп ре р ывн ом ха о тич е ско м ( т еп ло в ом ) дв иж е н ии. У земли каждая молекула испытывает около 7,5 млрд столкновений в секунду, средняя длина пробега между столкновениями составляет менее 0,1 мк.
Атмосфера земли условно делится на три слоя: тропосферу, стратосферу и ионосферу.
Т р о п о с ф е р а — это слой воздуха, прилегающий к земле. Верхняя граница тропосферы расположена на высоте 11 км. В тропосфере происходит постоянное перемешивание воздуха вследствие вертикальных и гори- зонтальных воздушных течений, образование облачности, осадков, а также возникают другие явления, определяющие погоду.
С т р а т о с ф е р а — это слой воздуха, простирающийся от 11 до 80км. В стратосфере нет облаков, а сле-
довательно, и осадков, ветры дуют горизонтально почти с постоянной скоростью.
Выше 80км расположена и о н о с ф е р а , в которой происходит сильная ионизация воздуха под действием космических лучей и ультрафиолетового излучения солнца.
При рассмотрении полетов летательных аппаратов в различных слоях атмосферы имеются в виду следующие особенности.
До высоты 100—150 км воздух можно рассматривать как сплошную среду, т. е. не учитывать, что он со-
стоит из отдельных молекул. Это допущение упрощает изучение законов обтекания тел воздухом.
На больших высотах разреженность воздуха столь велика, что рассматривать его как непрерывную среду
нельзя. Воздушная среда здесь практически состоит из свободных молекул, воздействие которых на летательные аппараты не связано с взаимодействием самих молекул.
§ 3. Основные параметры воздуха
К основным параметрам воздуха относятся давление, температура и массовая плотность.
Д а в л е н и е м (р) называется cила действующая на единицу поверхности тела перпендикулярно к ней;
измеряется она в мм рт. ст.. кГ/м2- или н/м2 (1 кГ/м2 = = 9,81 н/м2).
Давление воздуха — результат ударов молекул о поверхность тела. Величина давления тем больше, чем больше количество столкновений молекул с поверхностью и выше их скорость движения, которая зависит от температуры воздуха.
Т е м п е р а т у р о й называется степень нагретости тела. О на изм еряет ся в градус ах Кел ьвина (°К) или в
градусах Цельсия (°С). Пересчет температуры с °С на °К производится по формуле Г = 273 + t. Температура газа характеризует его внутреннюю энергию (сумму кинетической энергии поступательного и вращательного движения молекул).
М а с с о в о й п л о т н о с т ь ю в о з д у х а (р) называется масса его, заключенная в единице объема Р= m/v. Массовая плотность измеряется в кг . сек2/м4 или кг/м3 .
§ 4. Изменение параметров воздуха по высоте. Таблица МСА
Величина основных параметров воздуха зависит от высоты. Кроме этого, на величину параметров оказывают
влияние времена года, географическая широта, время суток и метеорологические условия.
Поэтому один и тот же вертолет, испытанный в различных местах земного шара или в разное время года, будет иметь различные летные данные. Необходимость сравнения летных характеристик различных вертолетов требует приведения этих характеристик к одинаковым атмосферным условиям.
Рис. 1.1. Изменение температуры воздуха в зависимости от высоты
 С этой целью рядом стран принята таблица стандартной атмосферы.
С этой целью рядом стран принята таблица стандартной атмосферы.
Данные таблицы (приложение 1) соответствуют среднегодовым параметрам воздуха в средних широтах земного шара. При составлении таблицы за основу был принят закон изменения температуры воздуха в зависимости от высоты (рис. 1.1). Согласно этому закону в пределах тропосферы (до 11 км) температура с подъемом на высоту уменьшается равномерно на 6,5° на каждый километр.
Давление и массовая плотность воздуха с подъемом на высоту уменьшаются, воздух становится более разреженным.
§ 5. Основные физические свойства воздуха
Наиболее важными для аэродинамики, являются следующие свойства воздуха: инертность, вязкость и сжимаемость.
И н е р т н о с т ь — свойство тел сопротивляться изменению состояния покоя или равномерного прямолинейного движения.
Инертность воздуха оценивается массовой плотно- стью. Чем выше массовая плотность, тем инертнее воз- дух, т. е. тем большую силу надо приложить, чтобы вывести его из состояния покоя или движения.
Вязкость — свойство воздуха сопротивляться взаимному сдвигу своих частиц.
Причиной вязкости являются силы внутреннего трения, возникающие в результате хаотического движения молекул. Свойство вязкости обнаруживается в газах в том случае, если соседние слои движутся с различными скоростями. Это явление наблюдается вблизи поверхности обтекаемого тела, в так называемом пограничном слое (рис. 1.2). В пограничном слое молекулы газа, непосредственно прилегающие к телу, как бы прилипают к его поверхности, а последующие слои перемещаются относительно друг друга. Скорость ча сти ц в озд у ха в по гр а ни чн ом с ло е по м ере уда ления от поверхности обтекаемого тела возрастает и на границе пограничного слоя становится равной скорости невозмущенного потока. Толщина пограничного слоя исчисляется миллиметрами, но при определенных условиях может достигать несколько сантиметров и более. В результате трения воздух в пограничном слое нагревается. Вязкость вне пограничного слоя, где отсутствует взаимное перемещение слоев воздуха, не проявляется.
С ж и м а е м о с т ь — свойство воздуха изменять массовую плотность при изменении давления. Это свойство воздуха обусловливается относительно большими расстояниями между молекулами. Поэтому небольшое повышение давления вызывает уменьшение объема воздуха и увеличение его плотности. Для уменьшения объема воздуха на
1%. У земли при стандартных атмосферных условиях необходимо увеличить давление на 0,01 кГ/см2. Для жидкостей эта величина в десятки тысяч раз больше (220 кГ/см2). Поэтому жидкости принято считать практически несжимаемыми.
Изменение плотности воздуха легко представить, если сжать воздух, находящийся в цилиндре. Несколько сложнее обстоит дело, когда рассматривается сжима ем ост ь в озд ух а, н е на хо дящ ег о ся в зам кн уто м объеме.
Если поместить в движущийся поток воздуха, например, пластину, то перед ней произойдет местное по- вышение давления и плотности. В связи с тем что газ обладает способностью выравнивать плотность, то местное повышение давления и плотности будет передаваться на соседние слои воздуха и распространяться в виде волн. Поскольку поток набегает на пластину непрерывно, то волны будут отходить также непрерывно. Если поток остановить, то волны будут продолжать свое движение, пока не затухнут под влиянием вязко ста воздуха. Скорость распространения таких волн г: воздухе при данной температуре имеет всегда постоянную величину, равную скорости звука.
§ 6. Скорость звука. Число М
Скорость звука — расстояние, которое проходит фронт звуковой волны за единицу времени. Звуковые волны образуются в результате сравнительно слабых изменений давлений и плотности воздуха. Сильные изменения давления и плотности (например, при взрыве бомбы) распространяются в воздухе со скоростью, превышающей скорость звука.
Величина скорости звука.в воздухе зависит только от темпеоатуры и может быть определена по формуле а = 20 V Т h Чем выше температура воздуха, тем труднее сжать воздух и тем больше скорость звука в нем. По условиям стандартной атмосферы у земли а = = 1225 км/час. С увеличением высоты скорость звука уменьшается из-за падения температуры. Например, на высоте 11 км а=1062 км/час.
Скорость звука характеризует сжимаемость воздуха, или, точнее, сопротивляемость воздуха сжатию. Одно
и то же повышение давления вызовет большее сжатие холодного воздуха. Но, с другой стороны, величина сжатия воздуха зависит от степени повышения давления перед телом, которое пропорционально скорости по- тока. Следовательно, величина сжатия воздуха перед телом (увеличение р) пропорциональна скорости потока и обратно пропорциональна скорости звука в нем, т. е.
определяется отношением V/a . Это отношение называется числом М.
где V — скорость полета [м/сек или км/час]; а — скорость звука [м/сек или км/час].
Число М является одним из важнейших параметров в аэродинамике больших скоростей.
Выдающи йся русски й уч еный С. А. Чаплы гин уж е в 1902 г. теоретически доказал, что если V<0,4 а, то волна возмущения в состоянии почти полностью выровнять плотность воздуха по всему потоку. Разность плот- ностей в точках потока с разными давлениями оказывается столь незначительной, что ею практически можно пренебречь и рассматривать воздух как несжимаемую жидкость. Получается так, что повышение давления перед пластиной приводит главным образом к увеличению температуры воздуха, а плотность увеличивается незначительно.
Это допущение позволяет в аэродинамике малых скоростей не учитывать сжимаемость воздуха, что зна- чительно упрощает рассмотрение явлений, связанных с обтеканием тел воздухом. Таким образом, аэродина- мика малых скоростей изучает движение тел в воздухе с числами М<0,4, считая в оздух несжи маем ым.
При числах М>1 обтекание тел уже качественно отличается от дозвукового. Это объясняется специфи-
ческими свойствами сверхзвукового потока.
§ 7. Основные уравнения воздушного потока
Состояние движущегося потока воздуха характеризуется скоростью V, давлением р, температурой Т h и массовой плотностью р.
Уравнения, связывающие эти величины, выводятся для так называемого установившегося потока. Параметры газа в каждом сечении установившегося потока не изменяются с течением времени. Считают, что
установившийся поток состоит из отдельных струек, которые движутся параллельно, не перемешиваясь. При этом каждую струйку можно представить в виде трубки с реальными стенками. Такой прием позволяет рассматривать движение отдельных независимых струек и применять к ним уравнения движения потока.
У р а в н е н и е н е р а з р ы в н о с т и . Уравнение неразрывности, сформулированное Эйлером в 1770г., представляет приложение общего закона сохранения материи к струйке (потоку) газа или жидкости.
Выделим из потока одну струйку и рассмотрим два произвольных сечения ее 1—1 и 2—2, площади которых соответственно обозначены f1 и f2 (рис. 1.3).
Масса газа т2 вытекающая за единицу времени через первое сечение, должна равняться массе т2, вытекающей за то же время через второе сечение (иначе пришлось бы допустить, что газ претерпевает разрывы внутри струйки
или выходит через
боковую поверхность
ее):
следовательно,
а откуда
Рис. 1.3. К выводу уравнения неразрывности
Полученное уравнение представляет уравнение посто- янства расхода или неразрывности течения. Его можно сформулировать так: секундная масса, или расход газа, во всех сечениях одной струйки есть величина постоянная.
В аэродинамике малых скоростей сжимаемость воздуха не учитывается, т. е. р = соnst. В этом случае уравнение примет вид Vf = соnst, или V1/V2=f2/f1.
Если струйка имеет одинаковую площадь сечения по длине, то скорость воздуха постоянна. В струйке переменного сечения скорость обратно пропорциональна пл оща ди се че н и я. Т ак, н апр и м ер , в суж а ю ще йс я струйке скорость увеличивается, причем если сечение струйки уменьшается в два раза, то скорость воздуха воз ра ста ет в дв а ра за.
У р а в н е н и е Б е р н у л л и . В 1738г. Д. Бернулли, исходя из общего закона сохранения энергии, вывел уравнение, устанавливающее связь между скоростью воздушного потока и давлением.
Полная энергия движущегося воздуха состоит из кинетической энергии, потенциальной энергии давления и внутренней энергии.
Известно, что внутренняя энергия воздуха пропорциональна его температуре. При малых скоростях воз- душного потока изменение температуры воздуха в результате изменения скорости оказывается столь незна- чительным, что внутренняя энергия воздуха в разных сечениях потока считается постоянной. Это допущение позволяет учитывать при малых скоростях потока только изменение кинетической и потенциальной энергий, сумма которых должна оставаться постоянной.
Кинетическая энергия, или энергия движения, определяется по формуле mV2/2.
Потенциальная энергия давления, или работа сил давления, на проталкивание массы воздуха т через по перечное сечение струйки f в единицу времени будет равна pfV.
Поскольку при малых скоростях изменение массовой плотности воздуха не учитывается, т. е. p1 = p2=P, а
Рис. 1.4. Отрыв крыши ветром.
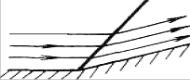
т { = т 2, то после сокращения получим уравнение Бернули без учета сжимаемости воздуха, тем меньше давление и наоборот. Увеличение скорости потока, т. е. кинетической энергии, возможно только за счет уменьшения потенциальной энергии, т. е. давления воздуха. В природе имеется много фактов, подтверждающих справедливость этого закона. Например, при обтекании наклонной крыши струйки воздуха над ней сужаются, скорость потока увеличивается, а давление уменьшается. Под действием разности давле- ний под крышей и над ней листы жести при сильном ветре срываются с крыши (рис. 1.4).
Уравнение неразрывности и уравнение Бернулли позволяют объяснить возникновение аэродинамических сил при обтекании тел воздушным потоком.
§ 8. Принцип обратимости в аэродинамике
В аэродинамике обычно рассматривается обтекание неподвижного тела движущимся потоком, тогда как в действительности в сравнительно неподвижном воздухе
движется летательный аппарат. Это вызывается тем, что в аэродинамике используются данные эксперимен- тальных исследований, проводимых в аэродинамических трубах (рис. 1.5), в которых неподвижно закрепленное тело обдувается потоком воздуха. Такой метод значительно упрощает исследования.
Как показывают теория и практика, характер аэродинамических сил зависит от скорости движения воз- духа относительно тела, но не зависит от того, движется ли поток относительно неподвижного тела или тело движется относительно воздуха. Данное положение в аэродинамике носит название принципа обратимости.
Помещенное в воздушный поток тело вызывает деформацию близлежащих струек или возмущение потока.
На достаточном удалении от тела струйки движутся параллельно друг другу с равными скоростями (невоз- мущенный поток). Видимая картина обтекания тел воздухом называется а э р о д и н а м и ч е с к и м с п е к т ром. Наблюдать картину обтекания можно в дымовых аэродинамических трубах (рис. 1.6).
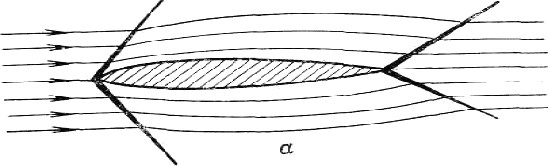
Внешний вид аэродинамического спектра определяется формой тела, положением его в потоке и скоростью потока. Тела удобообтекаемой формы имеют плавный характер обтекания (рис. 1.7). У тел не обтекаемой формы происходит отрыв потока от поверхности тела и образование вихрей (рис. 1.8). По внешнему виду спектра можно судить о характере изменения скорости и давления воздуха вблизи
тела. В местах суже ния струек с корост ь воз духа увеличивается, а давление уменьшается.
сил.
Зная закон распределения давления по поверхности тела, можно определить величины аэродинамических Ранее указывалось, что слой воздуха, прилегающий к поверхности тела, называется пограничным слоем. В нем происходит торможение частиц воздуха под действием сил трения между частицами воздуха и поверхностью тела.
Течение воздуха внутри пограничного слоя может быть ламинарным (слоистым) или турбулентным (за- вихрённым). Обычно в передней части тела пограничный слой ламинарный, а затем переходит в турбулент- ный (рис. 1.9). Положение точки перехода зависит от состояния поверхности тела и скорости потока.
С ухудшением состояния поверхности и увеличением скорости обтекания тела длина ламинарной части пограничного слоя уменьшается.
Необходимо отметить, что закон Бернулли для пограничного слоя не применим, так как полная энергия этого слоя не остается постоянной: часть ее в связи с наличием трения переходит в тепло и рассеивается.
Этим объясняется и то, что изменение скорости по толщине пограничного слоя не приводит к изменению дав- ления. Давление на поверхности тела сохраняется равным давлению в струйках, прилегающих к пограничному слою, что позволяет при рассмотрении спектров обтекания и распределения давления по поверхности не учитывать пограничный слой.
В дальнейшем мы будем рассматривать главным образом спектры обтекания специально профилированных тел — крыла и лопасти несущего винта вертолета.
§ 9. Геометрические характеристики крыла
К геометрическим характеристикам крыла относятся профиль крыла и форма крыла в плане.
Рис. 1.10. Основные размеры профиля Профиль крыла—форма его поперечного сечения (рис.1.10).
Линия, соединяющая переднюю и заднюю кромки крыла, называется хордой профиля. Длина обозначается хорды буквой b.
Наибольшая толщина профиля C max определяется длиной перпендикулярного к хорде отрезка между верхним и нижним контурами профиля. Отношение наибольшей толщины профиля к хорде называется относительной толщиной с. Она обычно выражается в процентах С= C max /b х 100% Для определения кривизны (вогнутости) профиля сначала строится средняя линия профиля. Для этого внутри
профиля проводится перпендикулярно хорде ряд линий, середины которых соединяют плавной линией (рис. 1.11). Кривизна профиля f определяется наибольшим расстоянием средней линии от хорды.
Рис. 1.11. Определение кривизны профиля
По форме профиль может быть симметричным, двояковыпуклым, плосковыпуклым (рис. 1.12).
Плосковыпуклый
§ 10. Угол атаки крыла
У г л о м а т а к и крыла называется угол между хордой крыла и направлением скорости невозмущенного потока.
Угол атаки может быть положительным, нулевым и отрицательным (рис. 1.13).
Величина и направление аэродинамических сил, действующих на крыло, при неизменной скорости набе-
гающего потока зависят от угла атаки.
§ 11. Распределение давления по профилю крыла
Величины давлений воздуха на поверхности крыла определяются опытным путем. Для этого в воздушный поток аэродинамической трубы помещают так называемое дренированное крыло (крыло, на поверхности ко- торого сделаны небольшие отверстия) и с помощью специального манометра замеряют избыточное давление Ризб в нескольких точках по длине профиля.
Избыточным давлением называется разность между местным давлением и давлением в невозмущенном потоке:
Ризб = Рместн - Ратм,
где Рместн — давление в данной точке профиля;
Ратм — давление в невозмущенном потоке.
Избыточное давление может быть положительным, когда Рместн>Ратм, или отрицательным, когда Рместн<Ратм Отрицательное избыточное давление для краткости в дальнейшем будет называться разрежением.
Так как по уравнению Бернулли с уменьшением скорости давление возрастает, то Ризб будет положительным там, где местные скорости струек меньше скорости невозмущенного потока; наибольшее же разрежение будет в точках, где местная скорость наибольшая, т. е. в местах максимальной толщины профиля.
Чтобы не связывать картину распределения давления по профилю с величиной скорости набегающего по- тока, пользуются не избыточными, а так называемыми относительными давлениями. Относительным давлением называется отношение избыточного давления к скоростному напору невозмущенного потока.
Следовательно, без учета сжимаемости воздуха относительное давление в любой точке профиля зависит только от отношения местной скорости к скорости невозмущенного потока.
Распределение давления по профилю изображается в виде векторных диаграмм. Для построения векторной диаграммы вычерчивается в масштабе профиль крыла, на нем размечаются точки, в которых измерялось дав- ление, и от них откладываются по нормали к контуру профиля величины р в виде векторов; затем концы век- торов соединяются кривой. Векторы направляются от профиля в зонах разрежения и к профилю в зонах повы- шенного давления (рис. 1.14, а). Часто векторы не изображаются,

а б
Рис. 1.14. Диаграмма распределения давления п о пр офилю кр ыла: а — с векторами; б — без векторов.
тогда повышенное давление указывается знаком плюс (+), а разрежение—минус (—) (рис. 1.14, б).
Характер распределения относительного давления зависит от формы профиля, угла атаки и числа М. При
увеличении угла атаки наибольшее разрежение увеличивается и смещается к передней части профиля. На малом отрицательном угле атаки наибольшее разрежение на верхней поверхности будет
Рис. 1.15. Аэродинамические спектры и распределение давления по профилю на разных углах атаки:
а — на малых углах атаки; б — на больших углах атаки; в — на отр иц ат ель ны х у гл ах ат ак и.
около хвостовой части профиля, а на нижней — около носовой его части. Картины распределения давления при разных углах атаки показаны на рис. 1.15. Влияние числа М на картину распределения давления рассматривается ниже.
§ 12. Подъемная сила крыла
Подъемная сила может быть подсчитана, если просуммировать проекции всех векторов избыточных
давлений на направление, перпендикулярное к набегающему потоку воздуха.
Если изобразить аэродинамический спектр крыла при положительном угле атаки, то можно увидеть, что
струйки воздуха, обтекающие верхнюю поверхность крыла, искривляются и сужаются больше, чем струйки, обтекающие нижнюю поверхность. В соответствии с уравнением неразрывности скорость воздуха над крыл ом возрастает больше, чем под крылом, а давление согласно уравнению
Рис. 1.16. Подъемная сила крыла
Бернулли уменьшается по сравнению с невозмущенным потоком над крылом в большей степени, чем под крылом. В этом случае на крыло будет действовать разность давлений, которая является причиной возникновения подъемной силы.
Направление подъемной силы принято считать перпендикулярным к направлению полета или набегающей потока
воздуха (рис. 1.16). Точка на хорде крыла в которой приложена подъемная сила, называется центром давления. На дозвуковых скоростях центр давления находится па расстоянии 25—30% хорды от носка профиля.
Коэффициент подъемной силы — величина безразмерная; он показывает, насколько хорошо крыло преобразует скоростной напор в подъемную силу. Величина су зависит главным образом от формы профиля и угла атаки, а при больших скоростях и от числа М. С увеличением относительной толщины и кривизны профиля су возрастает, так как пр и этих условиях струйки воздуха над крылом сужаются больше, а разность давлений
на нижнюю и верхнюю поверхности крыла увеличиваются.
Зависимость cv от угла атаки изображается в виде графика (рис. 1.17). Угол атаки, при котором с у =0, называется углом атаки нулевой подъемной силы а о . Для симметричных профилей а о = 0. С увеличением угла атаки коэффициент подъемной силы возрастает до максимального значения. При дальнейшем увеличении угла атаки из-за интенсивного срыва потока с крыла коэффициент подъемной силы падает. Угол атаки, при котором коэффициент подъемной силы достигает максимального значения (c.ymax), называется критическим углом атаки и обозначается аК р.
Величина акр для различных профилей равна 14—20°; С Уmах = 1,0-:-1,4. Спектр обтекания крыла при a>aкр показан на рис. 1.18.
§ 13. Сила лобового сопротивления крыла
Рис. 1.19. Лобовое сопротивление крыла
Все тела при движении в воздухе встречают определенное сопротивление, зависящее от формы, размеров и скорости движения тела. В аэродинамике оно называется силой лобового сопротивления. При обтекании воздушным потоком крыла сила лобового сопротивления, как и подъемная сила, приложена в центре дав- ления, но направлена параллельно набегающему потоку воздуха (рис. 1.19).
Причинами возникновения этой силы являются:
— трение воздуха о поверхность крыла;
— разность давлений перед крылом и за ним;
— перетекание воздуха на концах крыла.
Сила трения воздуха о поверхность крыла проявляется в пограничном слое и зависит от его характера. В ламинарном пограничном слое трение значительно меньше, чем в турбулентном. Поэтому для уменьшения сил трения на скоростных самолетах принимаются меры для получения возможно большей длины ламинарного пограничного слоя путем повышения точности изготовления и полировки наружных поверхностей крыла, фюзеляжа и оперения, а также применения в конструкции крыла специальных ламинизированных профилей.
Разность давлений воздуха перед крылом (повышенное) и за ним (пониженное) зависит главным образом от относительной толщины профиля.
Сопротивление трения и сопротивление давления в сумме составляют профильное сопротивление, т. е. сопротивление, зависящее в основном от формы профиля.
Влияние угла атаки на лобовое сопротивление крыла учитывается индуктивным сопротивлением, которое возникает в результате перетекания воздуха на концах крыла.
Мы выяснили, что при обтекании крыла воздушным потоком образуется разность давлений под крылом и над ним. Под действием разности давлений воздух будет перетекать на концах крыла из области повышен- ного давления в облас ть пониженного давлен ия (рис. 1.20). При перетекании происходит закручивание воздуха и образование двух концевых вихрей, которые сбегают с крыла. На образование концевых вихрей за- трачивается определенная энергия силовой установки летательного аппарата, что вызывает такой же эффект, как и увеличение лобового сопротивления крыла. Это добавочное сопротивление называется индуктивным со- противлением.
Такое название вызвано тем, что индуктивное сопротивление наводится (индуцируется) подъемной силой. Если подъемная сила равна нулю (разность давлений под крылом и над крылом отсутствует), то концевых вихрей, являющихся причиной индуктивного сопротивления, не будет.
 Рис. 1.20. Индуктивное сопротивление крыла
Рис. 1.20. Индуктивное сопротивление крыла
С увеличением угла атаки разность давлений воздуха под крылом и над ним возрастает, при этом будут соответственно увеличиваться подъемная сила и индуктивное сопротивление крыла.
Следовательно, сила лобового сопротивления крыла складывается из профильного и индуктивного сопро- тивлений. При сверхзвуковых скоростях к профильному и индуктивному сопротивлениям добавляется еще вол- новое сопротивление, которое будет рассмотрено ниже.
Необходимо отметить, что сила лобового сопротивления характеризует величину энергии, затрачиваемой на движение крыла с данной скоростью. Все рассмотренные виды сопротивлений сводятся в конечном счете к трению или повышению давления, а следовательно, к нагреву воздуха. С увеличением силы лобового сопро- тивления возрастает количество энергии, затрачиваемое летательным аппаратом на нагрев обтекающего воз- духа.
Величина силы лобового сопротивления определяется по формуле, аналогичной формуле подъемной силы:
где X —сила лобового сопротивления крыла, выражен н ая в к Г ил и в н
с х — коэффициент лобового сопротивления (величина безразмерная). Коэффициент лобового сопротивления зависит от
формы профиля, состояния поверхности крыла, удлинения, угла атаки, а при больших скоростя х и от числа М.
Чем больше относительная толщина и кривизна профиля и хуже состояние
поверхности крыла, тем больше сх . У крыльев, имеющих большое удлинение л (отно- шение размаха крыла l к средней хорде lср ), интенсивность концевых вихрей мень- ше, а следовательно, меньше индуктивное сопротивление и Сх . С увеличением угла атаки с х возрастает (рис. 1.21). Наименьшее значение с х будет при а = ао, когда с у = 0, а следовательно, отсутствует индуктивное сопротивление.
§ 14. Аэродинамическое качество крыла
К=Y/X, или К=Су/Сх.
Понятие аэродинамического качества введено для оценки аэродинамического совершенства крыла.
Аэрод инам ичес ким к а ч е с т в о м к р ы л а называется отношение
подъемной силы крыла к силе лобового сопротивления на данном угле атаки
Это отношение показывает, во сколько раз при данном угле атаки подъемная сила Крыла больше его лобового
сопротивления. В среднем К max = 20—25. Чем больше качество, тем выше аэродинамическое совершенство крыла.
Аэродинамическое качество зависит от тех же факторов, которые влияют на коэффициенты с у и с х . Для
дан ног о кры ла к аче ст во зав ис ит от у гла а так и (рис. 1.22). /( = 0, когда с у = 0, т. е. при а =
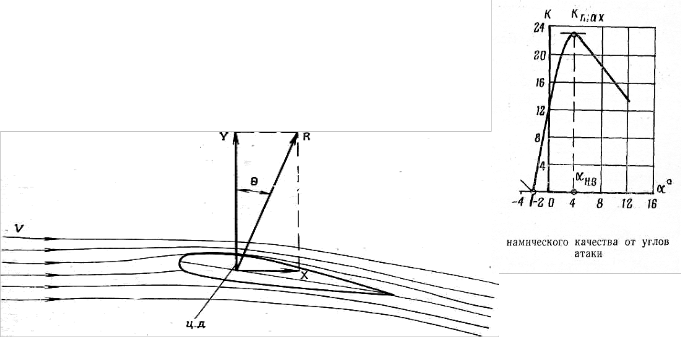
ао; С увеличением угла атаки качество растет и становится наибольшим при наивыгоднейшем угле атаки (а нв ). При дальнейшем увеличении а качество уменьшается, так как рост Сх становится более энергичным, чем рост с у ; aHB = 4-:-6°.
Подъемная сила и лобовое сопротивление крыла являются аэродинами ческими
силами, приложенными в одной точке. Если их сложить, то получим силу R,
которая называется полной аэродинамической силой крыла (рис. 1.23).
Угол, заключенный между силами R и Y, называется УГЛОМ качества О. Из рис. 1.23 видно, что чем больше аэродинамическое качество, тем меньше угол качества.
Рис- 1.23. Полная аэродинамическая сила крыла
В действительности на крыло действует распределенная аэродинамическая нагрузка, в сумме дающая силу R, которую мы для удобства изучения раскладываем на две составляющие: подъемную силу Y и силу лобового сопротивления X.
§ 15 Волновое сопротивление
Волновое сопротивление вызывается скачками уплотнения, которые возникают при движении тел со сверх-
звуковыми скоростями.
Образование скачков уплотнения связано с тем, что сверхзвуковой поток плавно затормозить нельзя. При рассмотрении спектров обтекания тел дозвуковым потоком было выяснено, что повышение давления, возни- кающего перед телом, распространяется со скоростью звука вперед и заранее перед телом отклоняет струйки воздуха, как бы подготавливая их к обтеканию тела.
Иначе обстоит дело в сверхзвуковом потоке, в котором волны повышенного давления не могут уйти вперед, поскольку скорость их движения меньше скорости набегающего потока. Волны повышенного давления как бы накладываются друг на друга, образуя скачки уплотнения. По этой причине торможение сверхзвукового потока движущимся телом наступает внезапно и осуществляется в скачке уплотнения, который по своей Природе напоминает ударную волну, возникающую при взрыве и распространяющуюся со сверхзвуковой скоростью.
Скачок уплотнения представляет тонкий слой сильно сжатого воздуха, в котором происходит резкое
(скачкообразное) торможение скорости и увеличение давления, температуры и плотности.
16
Толщина скачка очень мала и соизмерима с длиной свободного пробега молекул. Частицы воздуха, проходя поверхность скачка, резко затормаживаются и за скачком продолжают движение с меньшей скоростью.
Ударная волна, вызванная взрывом, распространяется вначале со сверхзвуковой скоростью. По мере удаления от места взрыва интенсивность ударной волны и ее скорость уменьшаются и на некотором расстоянии она превращ а ется в з вукову ю вол ну.
Самолет, летящий со сверхзвуковой скоростью, также создает ударную волну, которая движется вместе с самолетом. Длина фронта ударной волны может достигать нескольких километров, доходить до
земли' и восприниматься в виде «хлопков» — звуков взрыва.
Скачки уплотнения можно наблюдать при продувке тел в сверхзвуковых аэродинамических трубах. На
экране, куда проектируется изображение тела, скачки получаются в виде темных полос (рис. 1.26).
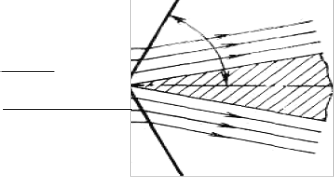
По своему положению относительно потока скачки делятся на прямые и косые. Наиболее интенсивным яв- ляется прямой скачок, образующийся перед телом с тупой носовой частью (рис. 1.27, а), а также в случае торможения потока в сверхзвуковом сопле (рис. 1.27, б). Поверхность прямого скачка перпендикулярна к направлению набегающего потока воздуха, скорость после скачка всегда дозвуковая.
Косые скачки образуются при обтекании тел с острой передней кромкой (рис. 1.28, а), а также в местах поворота сверхзвукового потока, если при этом происходит торможение (рис. 1.28,6). Поверхность косого скачка расположена под углом к потоку. Величина этого угла зависит от формы тела и числа М. Чем больше число М, тем меньше угол наклона скачка. После косого скачка поток, отклоняется от первоначального направления, скорость его уменьшается, но может остаться сверхзвуковой.
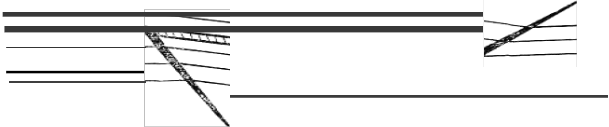
Спектры обтекания и положение скачков уплотнения для профиля при а = 0 и пластинки при а>0 показаны на
рис. 1.29. Головной и хвостовой скачки уплотнения возникают, когда число М несколько больше единицы.
Образование скачков уплотнения связано с большими потерями энергии, которая затрачивается на нагрев
воздуха. Если бы удалось затормозить сверхзвуковой по ток плавно, без скачка, то давление плавно заторможенного воздуха оказалось бы больше давления воздуха, заторможенного скачком.
Особенно большие потери дает прямой скачок. Так, например, при М=4 в прямом скачке превращается в теплоту и рассеивается около 80% механической энергии потока. В косом скачке с углом наклона 30° при
этом же числе М теряется только 20% энергии. Поэтому торможение потока в прямых скачках невыгодно.
Поскольку форма скачка зависит от формы тела, стремятся придать телам, обтекаемым сверхзвуковым
потоком, такую форму, чтобы возникали косые скачки возможно меньшей интенсивности. На рис. 1.30 показан предложенный К. Э. Циолковским профиль крыла сверхзвукового летательного

аппарата, при движении которого в сверхзвуковом потоке прямые скачки уплотнения отсутствуют.
Образование скачков уплотнения является одним из физических примеров действия закона диалектики о пе- реходе количества в качество. Количественные изменения параметров воздуха при обтекании тел дозвуковым потоком при переходе через скорость звука дают качественное изменение картины обтекания с образованием скачков уплотнения.
Сопротивление, вызываемое скачками уплотнения, на зывае тся волн овым с опрот ивле нием .
17
V > a
Угол 11аклона скачка
а
V>a
/
б
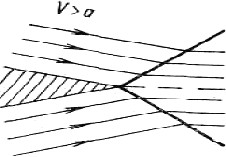
Рис. 1.28. Об р азова ние косого скачка уплот нени я:
а - nрп обтеJ<ании остроt·о тe.rta; б - в случ а е поворота
110тnка с ,·о-рмо:> <енпеt
: ·:: =
----------------
6
Рис. 1.29. Образов а н не скачков у п лот ненн я:
а - "f."' обтеканн и nрофJiля ( о.- 0) ; б - - nрн обтека н"н nJiaCПIHЫ
( et.> о )
18
§ 16.Волновой кризис
Ранее было сказано, что местные скорости обтекания профилированного тела отличаются по величине от скорости невозмущенного потока. При некоторой дозвуковой скорости набегающего потока наибольшая из местных скоростей может стать равной местной скорости звука. Под местной скоростью звука понимается скорость звука, обусловленная температурой в данной
точке потока. У крыла в районе наибольшей толщины может возникнуть зона местных сверхзвуковых скоро- стей. Но так как скорость воздуха до подхода к крылу и за крылом дозвуковая, местная сверхзвуковая скорость должна уменьшиться и стать дозвуковой. Уменьшение сверхзвуковой скорости происходит всегда скачком, поэтому на крыле возникает местный скачок уплотнения (рис. 1.31). По форме это прямой скачок сравнительно небольшой интенсивности. Образование его аналогично
возникновению скачков в сверхзвуковом сопле.
Скорость невозмущенного потока, при которой где-либо на крыле наибольшая местная скорость становится равной местной скорости звука, называется критической с к о р о с т ь ю (VKP).
Местные скачки уплотнения возникают обычно вначале на верхней, а затем на нижней поверхности крыла
и при увеличении числа М перемещаются назад, превращаясь в хвостовой скачок. Одновременно с возник-
новением хвостового скачка образуется головной, расположенный перед крылом.
При возникновении местных скачков уплотнения на крыле изменяются картина распределения давления и величина аэродинамических сил, появляется волновое сопротивление.
Совокупность явлений, наблюдаемых при возникновении местных скачков уплотнения, называется волновым
к ри зи сом .
На сверхзвуковых самолетах для увеличения МК р, уменьшения волнового сопротивления и более плавного развития волнового кризиса применяются крылья и оперение стреловидной или треугольной формы в плане.
Г л а в а 2 ОСНОВЫ АЭРОДИНАМИКИ НЕСУЩЕГО ВИНТА
§ 1. Назначение и типы воздушных винтов
Назначение воздушного винта состоит в преобразовании крутящего момента, передаваемого от двигателя, в аэродинамическую силу. Образование аэродинамической силы объясняется третьим законом механики. Воз- душный винт при своем вращении захватывает и отбрасывает некоторую массу воздуха. Эта масса, сопро- тивляясь отбрасыванию, толкает винт вместе с летательным аппаратом в сторону, противоположную на- правлению отбрасывания.
Причиной создания аэродинамической силы воздушного винта является реакция отбрасываемой винтом массы воздуха.
Воздушные винты самолета служат для создания силы тяги, необходимой для поступательного движения самолета.
Несущий винт вертолета служит для создания подъемной силы, необходимой для удержания вертолета в воздухе, и силы тяги, необходимой для поступательного движения вертолета. Как было указано, одним из до- стоинств вертолета является его способность перемещаться в любом направлении. Направление перемещения вертолет а зави сит о т т ого, куд а нак лонена си ла тяги несущего винта — вперед, назад или вбок (рис.
1.32).
Несущий винт обеспечивает управляемость и устойчивость вертолета на всех режимах. Таким образом, не-
сущий винт одновременно выполняет роль крыла, тянущего винта и основных органов управления.
Рулевые винты вертолета служат для уравновешивания реактивного момента и путевого управления вер-
толетом.
Рис. 1.32. Составляющие тяги несущего винта
19
§ 2. Основные параметры, характеризующие несущий винт
К основным параметрам, характеризующим несущий винт вертолета, относятся:
К о л и ч е с т в о л о п а с т е й z. На современных вертолетах применяются трех-, четырех- и пятилопастные
винты. Увеличение количества лопастей ухудшает работу несущего винта из-за вредного взаимного влияния лопастей. Уменьшение количества лопастей (меньше трех) приводит к пульсирующему характеру тяги, соз- даваемой винтом, и повышенным вибрациям вертолета в полете. Диаметр несущего винта D — диаметр окруж- ности, описываемой концами лопастей при вращении. Радиус этой окружности обозначается буквой R и на- зывается радиусом несущего винта. Расстояние от оси вращения несущего винта до рассматриваемого сечения обозначается буквой г (рис. 1.33).
Расчеты показывают, что при одной и той же подводимой к винту мощности его тяга увеличивается с уве- личением диаметра. Так, например, увеличение диаметрa вдвое увеличивает тягу в 1,59 раза, увеличение диаметра- в пять раз увеличивает тягу в 2,92 раза.
Однако увеличение диаметра связано с увеличением веса винта, с большой сложностью обеспечения проч-
ности лопастей, с усложнением технологии изготовления лопастей, увеличением длины хвостовой балки и др.
Поэтому при разработке вертолета выбирается некоторый оптимальный диаметр.
Площадь, о м е т а е м а я н е с у щ и м в и н т о м F0M, — площадь окружности, описываемой концами лопастей несущего винта при вращении.
Понятие ометаемой площади вводится потому, что эта площадь может рассматриваться как некоторая несущая поверхность, аналогичная крылу самолета ввиду вязкости и инертности воздуха, образующего при протекании через площадь, ометаемую винтом, одну общую струю. У современных вертолетов F0M= 100-:-1000 м2.
Н а г р у з к а на о м е т а е м у ю площадь р есть отношение веса вертолета G к площади, ометаемой винтом при его вращении:
FомР=G/Fом(кг/ м2 ).
Увеличение р приводит к уменьшению максимальной высоты полета и к увеличению скорости снижения на режиме самовращения несущего винта.
У современных вертолетов Р=12-:-45кг/ м2 , или 118-:-440н/ м2
Рис.1.33.Диаметр несущего винта
К о э ф ф и ц и е н т з а п о л н е н и я Q — величина, показывающая, какую часть ометаемой площади состав-
ляет пло щадь в сех л опас тей винт а.
Ф о р м а л о п а с т е й в п л а н е (рис. 1.34). Лопасть несущего винта может иметь
прямоугольную, трапециевидную или смешанную форму в плане. Сужение трапециевидной лопасти не более 2—3.
Сужением лопасти называется отношение хорды у комля к концевой хорде.
Смешанная
Рис. 1.34. Форма лопастей в плане
Профиль лопасти — форма ее поперечного сечения. Для лопастей несущих винтов применяются профили, аналогичные профилям крыльев самолетов. Обычно это несимметричные профили с относительной толщиной с =
7-=-14%'. Форма профиля по длине может быть переменной (аэродинамическая крутка лопасти). При выборе, формы профиля стремятся к тому, чтобы он обладал наибольшим аэродинамическим качеством

Угол а т а к и с е ч е н и я л о п а с т и а — угол между хордой профиля и направлением набегающего потока воздуха в данном сечении. Величиной угла атаки определяются значения коэффициентов аэродинамических сил.
Рис. 1.35. Угол установки (шаг) лопасти
У г о л у с т а н о в к и ( ш а г ) л о п а с т и (рис. 1.35). Углом установки Ф называется угол между
хордой профиля и плоскостью вращения несущего винта. Угол установки
вертолетных винтов замеряется на расстоянии 0,7 радиуса винта, Эта условность введена благодаря
наличию геометрической крутки лопастей, вследствие которой все сечения лопастей имеют разные (умень- шающиеся к концу) углы установки. Необходимость геометрической крутки объясняется следующим. Во-первых, ввиду увеличивающейся к концу лопасти окружной скорости происходит неравномерное распределение ин- дуктивных скоростей, а следовательно, и аэродинамических сил по длине лопасти. Для обеспечения более рав- номерного распределения нагрузки угол установки к концу лопасти уменьшается. Во-вторых, в поступательном полете из-за роста угла атаки в определенном положении лопастей возникает срыв потока с концов лопастей, наличие геометрической крутки отодвигает концевой срыв в сторону больших скоростей полета. Подробнее этот вопрос будет рассмотрен ниже.
Шаг лопасти несущего винта изменяется при повороте ее в осевом шарнире, т.е. вокруг продольной оси.
20
Конструктивно несущий винт выполнен так, что все его лопасти в осевом шарнире могут одновременно повора-
чиваться на один и тот же угол или на разные углы.
Угол а т а к и н е с у щ е г о в и н т а . Выше было сказано, что площадь, ометаемая несущим винтом, может
рассматриваться как несущая поверхность, на единицу площади которой приходится определенная нагрузка.
Введем понятие — угол атаки несущего винта А, под которым будем понимать угол между плоскостью вращения несущего винта и направлением набегающего потока воздуха (направлением полета). Если поток набегает на плоскость вращения несущего винта снизу (рис. 1.36), угол атаки считается положительным, если сверху — отрицательным.
Поскольку вертолет перемещается в воздухе в любом направлении, угол атаки несущего винта может изменяться в пределах ±180°. При вертикальном снижении А = +90°, при вертикальном подъеме А = —90°.
 Рис. 1.36. Угол атаки несущего винта
Рис. 1.36. Угол атаки несущего винта
У г о л а з и м у т а л ь н о г о п о л о ж е н и я л о п а с т и . При пол е те ве рто лета вра щат ел ьное движ е ние лопастей несущего винта складывается с поступательным движением всего вертолета в целом. По этой причине условия работы лопастей в большей степени зависят от их положения относительно направления полета. Для оценки особенностей работы лопастей в зависимости от их положения вводится понятие азимутального положения лопасти.
Углом азимутального положения лопасти называется угол между направлением полета и продольной
осью лопасти (рис. 1.37). Принято считать ф=0, если продольная ось лопасти совпадает с направлением набегающего потока воздуха. Следует заметить (поскольку вертолёт может совершать движение вперёд, назад или вбок), что во всех случаях отсчет угла азимутального положения
должен производиться от направления лопасти, совпадающего с направлением набегающего потока воздуха. Отсчет принято вести в направлении вращения несущего винта. Очевидно, что величина угла азимутального положения лопасти за один оборот изменяется от 0 до
360° (от 0 до 2л).
Ч и с л о о б о р о т о в несущего в и н т а п. В связи с тем что
несущие винты вертолетов — это винты больших диаметров, число оборотов их невелико — 100—600 обIмин.
Как показывают расчеты, чтобы иметь винт возможно большей тяги (при заданной мощности), необходимо увеличивать его диаметр и уменьшать обороты. Так, например, для того чтобы увеличить тягу в три раза, обороты надо уменьшить в пятнадцать раз (при этом диаметр в инта в озраст ет примерн о в пя ть ра з).
Для конкретного винта тяга с увеличением оборотов возрастает, но для этого требуется увеличение подводимой мощности.
Число оборотов несущего винта ограничивается волновым кризисом, возникающим в первую очередь на концах лопастей, движущихся навстречу набегающему потоку
(вблизи азимута г|) = 90°).
Во избежание больших потерь на преодоление волнового сопротивления число оборотов несущих винтов
современных вертолетов выбирается таким, чтобы концы лопастей имели дозвуковые скорости обтекания. У современных вертолетов окружные скорости концов лопастей достигают 200—250 м/сек.
§ 3. Сила тяги идеального несущего винта при осевом обтекании
Идеальным винтом называется винт, при работе которого не учитываются потери на трение и закручива-
ние струи за винтом.
Режимом осевого обтекания называется такой режим, при котором воздушный поток направлен вдоль оси вращения винта. При этом угол атаки несущего винта равен 90°. На режиме осевого обтекания несущий винт работает при висении, вертикальном подъеме и вертикальном снижении вертолета.
Несущий винт подсасывает воздух со скоростью и1 и отбрасывает его со скоростью и2. Скорости и1 и и2
называются индуктивными скоростями (рис. 1.38).
Если скорость потока, обтекающего винт, равна V, то перед винтом она становится равной V + и1, а за винтом V+и2.
21
Масса воздуха, пройдя ометаемую площадь, получает ускорение j под действием силы F, создаваемой винтом. На основании третьего закона механики с такой же по величине, но противоположно направленной силой Т воздух действует на несущий винт. Сила Т является тягой винта. На основании второго закона меха- ники T=mj.
Массу воздуха, проходящего через ометаемую площадь, можно определить умножением объема на массовую
плотность.
Н. Е. Жуковским теоретически доказано и экспериментально подтверждено, что индуктивная скорость от- брасывания вдвое больше индуктивной скорости подсасывания. Иначе говоря, индуктивная скорость у диска винта равна половине общего приращения скорости, полученного воздухом, прошедшим через винт.
Индуктивная скорость подсасывания определяется опытным путем и равна 8—15 м/сек.
Из полученной формулы тяги следует, что сила тяги несущего винта зависит от массовой плотности воздуха, ометаемой площади и индуктивной скорости подсасывания.
С увеличением высоты полета или повышением температуры окружающего воздуха массовая плотность P, а следовательно, и сила тяги уменьшаются. С увеличением оборотов и шага винта индуктивная скорость и1 (тяга винта) возрастает.
Площадь, ометаемая несущим винтом Fоv, является конструктивным параметром и для конкретного винта постоянна.
Сила тяги несущего винта может быть получена и другим путем — как сумма аэродинамических сил, создаваемых отдельными лопастями, поскольку обтекание лопастей аналогично обтеканию крыла. Разница, однако, состоит в том, что лопасть совершает не поступательное, а вращательное движение, в связи с чем все ее сечения (элементы) движутся с разными скоростями. Поэтому аэродинамическая сила, создаваемая лопастью, должна вычисляться как сумма аэродинамических сил, действующих
на элемент лопасти (рис. 1.39).
Рис. 1.39. Силы, действующие на элемент лопасти
Подъемная сила элемента лопасти ?Y и лобовое сопротивление элемента ?Х соответственно отличаются по величине от силы тяги элемента ?T и силы сопротивления вращению элемента ?Q.
Объясняется это тем, что подъемную силу направляют перпендикулярно к набегающему на сечение потоку,
лобовое сопротивление — по потоку, силу тяги — перпендикулярно к плоскости вращения элемента, а силу сопротивления вращению располагают в плоскости вращения (рис. 1.40).
§ 4. Сила тяги несущего винта при косом обтекании
Под режимом косого обтекания понимают такой режим, при котором воздушный поток направлен под некоторым произвольным углом атаки к плоскости вращения несущего винта (не равном 90°). Этот режим осуществляется при горизонтальном полете вертолета, а также при подъеме и снижении по
Т
22
Рис. 1.41. Образование тяги винта при боковом обтекании:
Vi — скорость воздуха, подходящего к винту; Vi — скорость воздуха, отбрасываемого винтом
наклонной траектории.
Для упрощения изучаемого вопроса- предварительно рассмотрим случай бокового обтекания несущего винта, т. е. такой случай, при котором поток направлен параллельно плоскости вращения несущего винта и угол атаки винта равен нулю. При этом скорость набегающего потока V складывается со скоростью подсасывания щ и дает результирующую скорость V1 (рис. 1.41). Очевидно, что V>u1.
Из формулы видно, что при одной и
той же скорости отбрасывания и2 тяга винта при боковом обтекании больше, чем при осевом. Физически это объясняется
увеличением секундной массы воздуха, протекающего через площадь, ометаемую винтом.
При рассмотрении более общего случая косого обтекания, когда воздух подходит к плоскости, ометаемой винтом под некоторым произвольным углом атаки несущего винта А, получим аналогичную картину. Необходимо только иметь в виду, что в каждом конкретном случае результирующая скорость воздуха, притекающего к плоскости несущего винта, должна равняться геометрической сумме скорости набегающего потока и скорости подсасывания.
§ 5. Изменение силы тяги несущего винта
при косом обтекании в зависимости от азимутального положения лопастей
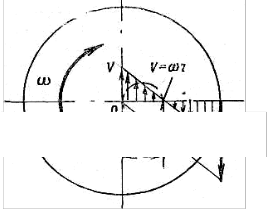
При косом обтекании несущего винта скорость потока, обтекающего лопасти, складывается из скорости вращательного движения и поступательной скорости набегающего потока воздуха. Для простоты рассуждения рассмотрим обтекание концевого сечения лопасти. Заметим, что составляющая скорости набегающего потока, направленная вдоль лопасти, в создании подъемной силы не участвует. Окружная скорость концевого сечения

равна wR.
Пусть скорость набегающего потока равна V. Разложим эту скорость
на на правление вдоль лопасти и перпендикулярно к ней (рис. 1.42).
В азимуте 90° она становится равной + V и в азимуте 270° равной —V. Таким образом, за один оборот лопасти скорость ее обтекания достигает максимума в азимуте 90° и минимума в азимуте 270°.
Из формулы видим, что сила тяги лопасти — величина переменная и зависит от азимута. Максимальное значение она приобретает в азимуте 90°, когда величина окружной скорости складывается со скоростью полета, минимальное значение — в азимуте 270°, когда скорость полета вычитается из окружной скорости.
величина силы тяги двухлопастного винта зависит от азимута и является величиной переменной. Переменная составляющая силы тяги двухлопастного винта вызывает повышенную вибрацию вертолета, в связи с чем применение двухлопастных несущих винтов ограничено. Для вычисления силы тяги трехлопастного винта необходимо сложить тяги трех лопастей, отстоящих по азимуту на 120° друг от друга. Элементарные математические вычисления показывают, что для винтов, имеющих три и более лопастей, переменная составляющая исчезает и общая тяга
становится величиной постоянной, не зав исяще й от азимута .
Очень важно отметить, что общая сила тяги несущего винта с
жестко закрепленными на втулке лопастями при косой обдувке не совпадает с осью вращения, а смещена в сторону лопастей, движущихся навстречу потоку возду ха. Это объясняетс я тем, что подъемная сила лопастей, движущихся навстречу потоку, больше, чем у лопастей, движущихся по направлению потока, и в результате геометрического сложения равнодействующая подъемных сил оказывается смещенной в сторону лопастей, движущихся навстречу потоку. Смещенная сила тяги несущего винта создает относительно центра тяжести вертолета опрокидывающий (кренящий) момент (рис. 1.43). Несущий винт с жестко закрепленными лопастями неминуемо опрокинул бы вертолет при попытке создать сколько-нибудь существенную поступа- тельную скорость.
Помимо кренящего момента, стремящегося опрокинуть вертолет относительно продольной оси, при косой обдувке несущего винта возникает еще и продольный момент, поворачивающий плоскость вращения несущего винта относительно поперечной оси на увеличение угла атаки. Возникновение этого момента объясняется тем, что условия обтекания лопастей вблизи азимута 180° лучше, чем в азимуте
360°. Вследствие этого точка приложения силы тяги винта смещается вперед от оси вращения, что и приводит к образованию кобрирующего
момента. Величина продольного момента упругой лопасти дополнительно
увеличивается благодаря изгибу лопастей вверх под действием подъемных сил по причине того, что на лопасть, находящуюся в районе азимута 180°, встречный поток действует снизу, тогда как на
Рис. 1.43. Возникновение опрокидывающего момента у винта с жестко закрепленными лопастями
лопасть, находящуюся в районе азимута 0°, — сверху (рис. 1.44).
23
Устранение вредного влияния опрокидывающего и продольного моментов осуществляется шарнирной подвеской
лопастей.
§ 6. Сопротивление несущего винта при косом обтекании
Плоскость, ометаемая несущим винтом, рассматривается как несущая поверхность. Эта поверхность соз- дает подъемную силу и лобовое сопротивление за счет набегающего потока воздуха. Сопротивление несущего винта по аналогии с крылом состоит из профильного и индуктивного.
При осевом обтекании профильные сопротивления лопастей во всех азимутах одинаковы и равнодействующая
их ра вна н ул ю.
Физический смысл появления профильного сопротивления при косом
обтекании можно представить следующим образом.
За один оборот сопротивление лопасти периодически изменяется,
достигая своего максимума в азимуте 90° и минимума в азимуте 270°. Разность сопротивлений «наступающей» и«отступающей» лопастей дает силу, направленную в сторону, противоположную движению верто- лета. Эта сила и есть профильное сопротивление несущего винта Х пр (рис. 1.45). Индук- тивное сопротивление несущего винта можно объяснить теми же
причинами, что и при обтекании крыла, т. е. образованием вихрей, на которые расходуется энергия потока. Лобовое сопротивление несущего винта складывается из профильного и индуктивного Х нв = Х пр + Х ин
Величина лобового сопротивления несущего винта зависит от формы профиля лопастей, угла их установки, числа оборотов , скорос ти полета и угла атаки нес ущего винта.
Лобовое сопротивление несущего винта необходимо учитыват ь пр и полете н а режи ме са мовр ащения.
Рис. 1.45. Возникновение профильного сопротивления
несущего винта.
§ 7. Зона обратного обтекания
При движении лопасти в азимутах Ф = 180-:-360° сечения лопасти, расположенные вблизи комля, обтекаются не с ребра атаки, а с ребра обтекания. Действительно, в азимуте
270° такое обтекание будет у всех сечений лопасти, расположенных от оси вращения до точки на лопасти, в которой v = wr, т. е. до той точки, где окружная скорость равна скорости полета (рис. 1.46). Из-за противоположного направления этих скоростей суммарная скорость
обтекания в этой точке равна нулю (Wr = 0).
Задаваясь различными значениями ф, легко получить из последнего
выражения зону обратного обтекания. Нетрудно убедиться в том, что эта зона представляет окружность диаметром d= V/w, расположенную на диске, ометаемом несущим винтом (рис. 1.46).
Наличие зоны обратного обтекания — явление отрицательное. Часть лопасти, проходящая через эту зону, создает силу, направленную вниз, что уменьшает тягу несущего винта и приводит к увеличению
Рис. 1.46. Зона обратного обтекания
вибраций лопастей и всего вертолета. С увеличением скорости полета зона обратного обтекания увеличивается.
Величину зоны обратного обтекания можно оценить коэффициентом характеристики режима работы несущего винта м. Под
коэффициентом характеристики режима работы несущего винта понимают отношение скорости поступательного движения к окружной
скорости концевого сечения лопасти.
Коэффициент показывает, какая часть лопасти, находящейся в
азимуте 270°, расположена в зоне обратного обтекания. Так, например,
если м=0,25, то d = 0,25 R. Это означает, что четвертая часть лопасти работает в условиях обратного
обтекания, а диаметр зоны обратного обтекания составляет 25% радиуса несущего винта.
§ 8 Потери энергии несущим винтом. Относительный КПД винта
При выводе формулы тяги идеального винта (§ 3 настоящей главы) мы пренебрегали всеми видами потерь. При работе реального винта на рабочих режимах около 30% потребной для его вращения мощности затрачивается на преодоление профильного сопротивления лопастей. Величина профильных потерь зависит от формы профиля и состояния поверхности.
Анализируя работу идеального винта, мы предполагали, что индуктивная скорость во всех точках ометаемой площади одинакова. Но это не так. Вблизи лопасти индуктивная скорость больше, чем в промежутках между лопастями. Кроме того, индуктивная скорость изменяется вдоль лопасти, возрастая с увеличением радиуса сечения, из-за увеличения окружной скорости сечения (рис. 1.47). Таким образом, поле индуктивных скоростей, создаваемое несущим винтом, неоднородно.
24
Рис. 1.47. Распределение индуктивных скоростей по поверхности вращения несущего винта
Соседние струйки воздуха движутся с разными скоростями, ввиду чего из-за влияния вязкости воздуха возникают потери на неравномерность потока или индуктивные потери, составляющие около 6% потребной мощности. Одним из способов уменьшения этих потерь является геометрическая крутка лопастей.
Несущий винт не только отбрасывает массу воздуха, создавая тем самым тягу, но и закручивает струю. Потери на закрутку струи составляют около 0,2% подводимой к винту мощности.
Из-за разности давлений под и над плоскостью вращения винта воздух перетекает снизу вверх по окруж- ности диска несущего винта. По этой причине некоторое узкое кольцо, расположенное по окружности плоскости, ометаемой несущим винтом, в создании тяги не участвует (рис. 1.48). Комлевые части лопастей, где распо- ложены узлы крепления, также не участвуют в создании силы тяги. В общей сложности концевые и ком- левые потери составляют около 3% потребной мощности.
Благодаря наличию перечисленных потерь мощность, потребная для вращения реального винта, создающего тягу, равную тяге идеального винта, получается больше.
Насколько удачен тот или иной реальный винт с точки зрения обеспечения минимума потерь, можно судить
по относительному КПД несущего винта г| 0 , который представляет собой отношение мощности, потребной для отбрасывания воздуха и получения данной тяги, к мощности, фактически затраченной на вращение ре- ального винта, создающего такую же тягу.
Рис. 1.48. Комлевые и концевые потери тяги винта
§ 9. Шарнирная подвеска лопастей несущего винта
В § 2 настоящей главы было указано на наличие у несущих винтов осевых шарниров, которые служат для изменения шага винта в полете. Изменение шага дости- гается поворотом лопастей вокруг осевых шарниров в пределах ? = 0— 15°.Кроме осевых шарниров, винты имеют горизонтальный и вертикальный шарниры.
Горизонтальный ш а р н и р (ГШ)позв ол яе т лопасти отклоняться в вертикальной плоскости. Благодаря
этому шарниру лопасть имеет возможность при движении навстречу потоку взмахивать вверх, а при движении по направлению потока — вниз. Таким образом, горизонтальный шарнир позволяет лопастям совершать маховые движения.
Угол, заключенный между осью лопасти и плоскостью втулки винта, называется углом взмаха ?. Кон-
структивно отклонение лопасти относительно горизонтального шарнира ограничивается упорами (вверх на
25—30°, вниз на 4—8°). Несмотря на наличие маховых движений в полете, лопасть не касается упоров, по- скольку диапазон углов взмаха меньше, чем угол между упорами. Касание лопасти упоров происходит лишь при сильном падении оборотов, а соответственно и при недопустимом уменьшении центробежной силы лопасти.
При стоянке вертолета, когда несущий винт не вращается или вращается с малыми оборотами, концы ло- пастей за счет своего веса прогибаются вниз, а если лопасть будет упираться в нижний упор, то возможен удар по хвостовой балке или фюзеляжу. Поэтому, помимо нижнего упора, имеется еще специальный ограничитель свеса, который при малых оборотах не дает возможности лопасти чрезмерно опуститься вниз и ударить по вертолету.
При повышении оборотов, когда аэродинамические силы прогибают концы лопастей вверх, ограничитель свеса выключается, после чего лопасть может совершать маховые движения вплоть до нижнего упора.
В е р т и к а л ь н ы й ш а р н и р (ВШ) обеспечивает отклонение лопасти относительно втулки в плоскости
вращения винта. Ниже будет показано, что при вращении несущего винта лопасть может уходить от нейтраль- ного (радиального) положения назад или вперед на некоторый угол. Этот угол называется углом отставания (опережения) и обозначается буквой ?. Величина этого угла ограничивается упорами. Лопасть может повора- чиваться назад на ? = 10-:-18° и вперед на ? = 6-:-8°*.
Наличие горизонтального и вертикального шарниров вносит существенное изменение в работу несущего
винта.

* В технических описаниях величина угла отставания (опережения) дается не относительно радиального положения лопасти, а относительно перпендикуляра к горизонтальному шарниру.
25
Во-первых, необходимо отметить образование так называемого конуса (тюльпана) вследствие того, что под действием подъемных сил лопасти отклоняются относительно горизонтальных шарниров и поднимаются над плоскостью вращения втулки. Во-вторых, за счет маховых движений выравниваются подъемные силы лопастей в разных азимутах, что дает возможность устранить опрокидывание и кабрирование вертолета при поступательном полете. Наконец, комлевые сечения лопастей разгружаются от больших изгибающих моментов, которые имеют место при жесткой заделке лопастей.
§ 10. Горизонтальный шарнир (ГШ)
Рассмотрим равновесие лопасти относительно горизонтального шарнира, т. е. силы, действующие на ло-
пасть в плоскости, перпендикулярной к плоскости вращения (рис . 1.49).
В этой плоскости на лопасть действуют следующие силы: (Gл — вес; Yл — подъемная сила; Fц. б —
центробежная сила.
Подъемная сила в 10—15 раз больше веса лопасти. Самой больш ой я вл я е тся цен тр о бежная сила, превышающая вес лопасти в 100—150 раз. В равновесном положении сумма моментов всех сил, действующих на лопасть относительно ГШ, должна быть равна нулю. Иначе говоря, равнодействующая этих сил должна про- ходить через ось ГШ.
При вращении лопасть описывает поверхность, близкую к конусу, и поэтому угол взмаха называют углом конусности.
При осевом обтекании, постоянном шаге и оборотах значение угла
конусности вполне определенное. Если, например, увеличить
Рис.1.49. Силы действующие на лопасть в плоскости перпендикулярной плоскости вращения
шаг лопасти, то под действием возросшего момента от подъемной силы лопасть начнет отклоняться в сторону увеличения угла взмаха..
С увеличением угла взмаха одновременно увеличивается момент
центробежной силы, препятствующей отклонению лопасти, и когда вновь установится равновесие, лопасть будет вращаться с большим значением угла взмаха.
При косом обтекании в азимутах 0—180° лопасть движется навстречу потоку, а в азимутах 180—360° — по направлению потока. Лопасть, движущаяся навстречу потоку, получает прирост подъемной силы и взмахивает вверх, поскольку момент подъемной силы оказывается больше момента центробежной силы (моментом силы веса из-за малых величин пренебрегают).
У лопасти, движущейся по направлению потока, подъемная сила уменьшается, и под действием момента
центробежной силы она взмахивает вниз. Таким образом, за один оборот лопасть совершает взмах вверх и
взмах вниз.
Скорость обтекания наибольшая в азимуте 90°, поэтому и прирост подъемной силы здесь наибольший.
Наименьшая подъемная сила будет в азимуте 270°, где скорость обтекания минимальна и сильнее всего ска- зывается влияние зоны обратного обтекания. Однако благодаря наличию ГШ и маховых движений лопастей увеличение и уменьшение подъемных сил в указанных азимутах получаются сравнительно небольшими. Объясняется это изменением углов атаки у машущих лопастей. Действительно, при взмахе лопасти вверх угол атаки уменьшается, а при взмахе вниз — увеличивается (рис. 1.50). По этой причине величина подъемных сил по азимутам выравнивается, чем практически устраняется кренящий и продольный моменты, действующие на вертолет.
В итоге необходимо сказать, что назначение горизонтальных шарниров сводится к выравниванию подъемных сил лопастей во всех азимутах и к разгрузке комлевых сечений от изгибающих моментов. Го ри з он тальные шарниры конструктивно разнесен ы о т о си вр ащ ени я в ин та на не кот ор ое р ас ст оя ние Lгш (рис. 1.51). При осевом обтекании ось конуса вращения и ось втулки совпадают. Поэтому центробежные силы лопастей Fцб , условно приложенные к ГШ, взаимно уравновешиваются. При косом обтекании ось конуса и ось втулки не совпадают и центробежные силы лежат в разных (параллельных) плоскостях. Эти силы на некотором плече с создают момент М г. ш = FцбС, который улучшает управляемость вертолета. Кроме того, указанный момент при случайном отклонении вертолета относительно продольной или поперечной оси оказывает демпфирующее действие, т. е. направлен в сторону, противоположную отклонению, что улучшает устойчивость вертолета.
26
§ 11. Завал конуса вращения при косой обдувке
В предыдущем параграфе было указано, что благодаря наличию горизонтальных шарниров лопасти в ази- мутах 0—180° взмахивают вверх, а в азимутах 180— 360° — вниз. В действительности картина маховых движений лопастей выглядит несколько сложнее. Ввиду тог о что лопасти обладают массой, увеличение угла
взмаха по инерции продолжается не до азимута 180°, а несколько дальше, уменьшение — не до 360°, а также не ско льк о д а льш е. Пом и мо это г о, вб л изи а зи м ут а 180° воздушный поток притекает к лопасти снизу, а вблизи азимута 360°—сверху, что также дополнительно способствует продолжению увеличения угла взмаха вблизи азимута 180° и уменьшению угла взмаха вблизи азимута 360°.
На рисунке 1.52, а приведена экспериментальная кривая зависим ости у гла взмаха от азиму т а, полученн ая на установке В-1. Для испытуемой модели несущего винта с жесткими лопастями при скорости косой обдувки 20 м/сек максимальный угол взмаха оказался в азимуте 196°, а минимальный —в азимуте 22°. Это означает, что ось конуса вращения отклонена назад и влево. Явление отклонения оси конуса вращения несущего винта при косом обтекании называется завалом конуса вращения (рис. 1.53).
Теоретически конус несущего винта при косой обдувке заваливается назад и влево. Этот завал подтвержден и приведенным выше экспериментом. Однако на направление бокового завала существенное влияние оказывает деформация лопастей и разнос горизонтальных шарниров. Реальная лопасть несущего винта не обладает достаточной жесткостью и под влиянием действующих на нее сил
27
сильно деформируется — изгибается и закручивается. Закрутка происходит в сторону уменьшения углов атаки, в связи с чем взмах вверх прекращается раньше ( Ф= 160°). Соответственно раньше прекращается и взмах вниз (ф=340°).
На рисунке 1.52, б приведена экспериментальная кривая зависим ости угла взмах а от азим у та, полученн ая на установке В-2. При испытании модели винта с гибкими лопастями максимальный угол взмаха получен в азимуте ф=170°, а минимальный — в азимуте ф = 334°. Таким образом, у реальных вертолетов конус вра щения заваливается назад и вправо. Величина угла завала зависит от скорости полета, шага винта и оборотов. С увеличением шага винта и скорости и с уменьшением об оротов за вал ко нуса вр ащени я увеличи вается.
Управление современными вертолетами осуществляется наклоном конуса вращения в сторону перемещения вертолета. Например, для перемещения вперед летчик отклоняет ось конуса вращения несущего винта вперед (с помощью автомата перекоса). Наклон конуса сопровождается наклоном тяги несущего винта в соот- ветствующую сторону, что и дает необходимую составляющую для перемещения вертолета (рис. 1.32). Однако как только скорость полета начинает возрастать, вследствие косого обтекания конус заваливается назад и вбок. Влияние завала конуса парируется дополнительным движением ручки управления вертолетом.
§ 12. Вертикальный шарнир (ВШ)
Для того чтобы убедиться в необходимости установки, кроме горизонтального, еще и вертикального шар-
нира, рассмотрим силы, действующие на лопасть в плоскости вращения.
При вращении винта на его лопасти в плоскости вращения действуют силы сопротивления вращению Q л . На режиме висения эти силы будут одинаковы во всех азимутах. При косом обтекании винта сопротивление лопасти, движущейся навстречу потоку, больше, чем у лопасти, движущейся по направлению потока. Наличие горизонтальных шарниров и маховых движений лопастей способствует уменьшению этой разницы (благодаря выравниванию углов атаки), однако не устраняет ее полностью. Поэтому сила сопротивления вращению является переменной силой, нагружающей корневые части лопастей.
При изменении оборотов на лопасти несущего винта действуют инерционные силы, при увеличении оборо- тов— направленные против вращения, а при уменьшении оборотов — в сторону вращения винта. Инерционные силы могут возникать и при постоянных оборотах втулки несущего винта из-за неравно мерности потока воздуха, притекающего к диску несущего винта, что приводит к изменению аэро- динамических сил и дополнительному стремлению лопастей к перемещению относительно втулки. В полёте инерционные силы сравнительно невелики. Однако на земле в момент начала раскрутки несущего
винта инерционные силы достигают большой величины и при резком включении трансмиссии могут привести даже к поломке лопастей.
Кроме того, наличие горизонтальных шарниров, обеспечивающих маховые движения лопастей, приводит к тому, что центр тяжести лопасти периодически приближается и удаляется от оси вращения винта (рис. 1.54).
Исходя из закона сохранения энергии, кинетическая энергия вращающегося несущего
винта должна оставаться постоянной независимо от махового движения лопасти (изменениями остальных видов энергии пренебрегают). Кинетическая энергия вращающегося винта определяется по формуле:
где т— масса вращающихся лопастей;
 w —
w —
угловая скорость вращения лопасти,
г—расстояние от оси вращения до центра тяжести лопасти;
28
Из формулы видно, что при постоянной кинетической энергии приближение центра тяжести лопасти к оси вращения (взмах вверх) должно сопровождаться увеличением угловой скорости вращения, а удаление центра тяжести лопасти от оси вращения (взмах вниз) должно сопровождаться уменьшением угловой скорости вращения. Это явление хорошо известно танцорам, увеличивающим скорость вращения своего тела путем резкого приближения рук к туловищу (рис. 1.55). Силы, под действием которых происходит увеличение или уменьшение угловой скорости вращения при изменении момента инерции вращающейся системы, называют кориолисовыми.
При взмахе лопастей вверх кориолисовы силы направлены в сторону вращения несущего винта, при взмахе вниз — против.
Кориолисовы силы, возникающие при маховых движениях, достигают значительной величины и нагружают корневые части лопастей переменными
изгибающими моментами, действующими в плоскости вращения несущего винта.
Таким образом, постановка горизонтальных шарниров, позволившая
устранить передачу изгибающих моментов на втулку винта и разгрузить комлевые части лопастей в плоскости взмаха, в то же время вызвала и нежелательные явления, связанные с возникновением кориолисовых сил, нагружающих корневые части лопастей переменным моментом в плоскости вращения. Переменный момент от кориолисовых сил передается на подшипники ГШ, втулку несущего винта и вал двигателя, вызывая знакопеременные нагрузки, что приводит к ускоренному износу подшипников ГШ и вибрациям
вертолета.
Для разгрузки корневых частей лопастей от знакопеременных изгибающих моментов, действующих в плоскости вращения, а втулки — от знакопеременных нагрузок, вызывающих вибрации вертолета, устанавливаются вертикальные шарниры, которые в плоскости вращения, винта обеспечивают колебательные движения лопастей.
Кроме рассмотренных сил, на лопасть в плоскости вращения действует также центробежная сила.
При наличии вертикального шарнира и равномерном поле скоростей набегающего потока воздуха на режиме
висения лопасть отстает от радиального положения на определенный угол ?. На рисунке 1.56 показана величина угла отставания ?, обусловливаемая равенством моментов:
Fц.бLц.б =Qл LQ.
При переходе к полету с поступательной скоростью к аэродинамическим силам добавляются переменные инерционные и кориолисовы силы, а сами аэродинамические силы тоже становятся переменными. Под действием этих сил лопасть совершает сложное движение, состоящее из вращательного движения, поступательного (вместе с вертолетом), махового относительно ГШ и колебательного относительно ВШ.
При наличии ВЩ лопасть поворачивается на
некоторый угол отставания ? (рис.1.57,а). При этом лопасть располагается так, что равнодействующая аэродинамических и центробежных сил N направлена по ее оси. Перенося равнодействующую на ось ГШ и раскла- дывая ее на силы А и В, убеждаемся, что подшипники ГШ нагружены не одинаково. Действительно, при наличии одной силы А как
передний, так и задний подшипники ГШ были бы нагружены одинаковыми радиальными нагрузками. Однако сила
В, разгружая задний подшипник, дополнительно нагружает передний, вызывая неравномерный износ подшипников. Помимо этого, сила В, являющаяся для ГШ осевой, требует установки упорных подшипников.
Для приближения условий работы подшипников ГШ к условиям симметричной нагрузки применяется смещение
ГШ относительно втулки вперед по вращению (рис. 1.57, б). В этом случае наличие угла отставания ?
приводит к тому, что ось лопасти располагается примерно перпендикулярно к оси ГШ.
Так как верт икальн ые шарниры позво ляют лопастям совершать колебательные движения в плоскости вращения несущего винта, то для предотвращения возможности роста амплитуды этих колебаний на несущих
29
винтах современных вертолетов устанавливаются специальные демпферы — гасители колебаний. Демпферы бывают фрикционные и гидравлические. Принцип действия как тех, так и других состоит в превращении энергии колебаний в тепловую энергию, которая затем рассеивается в окружающее пространство.
На земле перед запуском двигателя и раскруткой несущего винта его лопасти должны быть поставлены на передние упоры ВШ. Делается это для уменьшения углового ускорения (силы инерции) лопастей в началь- ный момент раскрутки.
Неодинаковый поворот лопастей относительно ВШ вызывает смещение центра тяжести несущего винта от оси вращения. В результате при вращении винта возникает инерционная сила, вызывающая вибрацию (раскачку) вертолета.
Это явление представляет особую опасность при работе несущего винта на земле, поскольку частота собст- венных колебаний вертолета на упругом шасси может оказаться равной или кратной частоте вынуждающей силы, что приводит к колебаниям, которые принято называть земным резонансом.
§ 13. Компенсация взмаха
Как известно, основной причиной завала конуса вращения винта являются маховые движения лопастей при косом обтекании. Чем больше максимальный угол взмаха вверх, тем больше завал конуса вращения. Наличие большого завала конуса нежелательно, так как требует дополнительного отклонения командных рычагов для компенсации завала при управлении вертолетом в поступательном полете. Поэтому необходимо, чтобы равновесие моментов относительно ГШ устанавливалось при меньшей величине амплитуды маховых движений.
Для того чтобы амплитуда маховых движений была в пределах допуска, применяют компенсацию взмаха. Принцип компенсации взмаха заключается в том, что узел крепления поводка управления (А) устанавливается не на оси горизонтального шарнира, а сдвигается в сторону лопасти (рис. 1.58).
Если точка А не лежит на оси горизонтального шарнира и неподвижна, то при взмахе вверх угол установки, а значит, и угол атаки лопасти уменьшаются, а при взмахе вниз — увеличиваются. Вследствие изменения углов атаки при взмахах лопасти возникают аэродинамические силы, препятствующие возрастанию амплитуды маховых движений.
Эффективность компенсации в большой степени зависит от tg ?1 (рис. 1.58), называемого характеристикой компенсации взмаха. Чем больше tg ?1, тем на больший угол изменяется угол установки лопасти при взмахе. Следовательно, при увеличении tg ?1 эффективность компенсации взмаха возрастает.
Наличие угла отставания ? при установке вертикального шарнира может увеличивать амплитуду маховых
движений (рис. 1.59). При отклонении лопасти вокруг ВШ на угол ? передняя кромка (точка А) будет отстоять от ГШ дальше, чем задняя кромка (точка В). Поэтому при взмахе путь точки А больше пути, пройденного точкой В, в результате чего при взмахе вверх угол атаки лопасти возрастает, при взмахе вниз угол атаки лопасти уменьшается.

Рис. 1.59. Влияние угла отставания на угол установки лопасти
Таким образом, угол отставания будет способствовать возникновению на лопасти дополнительных аэро- динамических сил, стремящихся увеличить амплитуду маховых движений. Поэтому особенно целесообразно применение компенсации взмаха лопастей, имеющих вертикальный шарнир.
30
§ 14. Реактивный момент несущего винта
При вращении несущего винта на его лопасти действуют силы сопротивления воздуха, которые относи- тельно оси винта создают момент сопротивления вращению. Для преодоления этого момента к валу несущего винта на вертолетах с механическим приводом от двигателя, установленного в фюзеляже, подводится крутящий момент. Крутящий момент передается через главный редуктор на вал несущего винта. В соответствии с третьим законом механики (законом равенства действия противодействию) возникает реактивный момент, который через узлы крепления главного редуктора передается на фюзеляж вертолета и стремится вращать его в направлении, противоположном крутящему моменту. Крутящий момент и реактивный момент независимо от режима работы винта всегда равны между собой по величине и противоположны по направлению Мкр = Мр.
Если двигатели установлены на самих лопастях, очевидно, что реактивный момент отсутствует. Реактивный
момент отсутствует также и на режиме самовращения несущего винта, т. е. во всех случаях, когда крутящий
момент на вал несущего винта не передается от двигателя, уст ановл енного в фюзел яже.
Ранее было сказано, что уравновешивание реактивного момента на вертолетах одновинтовой схемы с ме- ханическим приводом производится моментом, создаваемым тягой рулевого винта относительно центра тя- жести вертолета.
У двухвинтовых вертолетов компенсация реактивных моментов обоих несущих винтов достигается вра- щением винтов в разные стороны. Причем для соблюдения равенства противоположно направленных реактивных моментов обоих винтов винты выполняются совершенно одинаковыми с точной синхронизацией их оборотов.
Мощность , пере давае мая на несу щий ви нт, р авна
Из формулы видно, что чем меньше обороты несущего винта, тем больше крутящий момент, а следова-
тельно, и реактивный.
Число оборотов несущего винта вертолета значительно меньше числа оборотов самолетного винта. По- этому при одинаковой мощности двигателя реактивный момент несущего винта вертолета значительно больше, чем самолетного винта.
Крутящий и реактивный моменты Изменяются также в зависимости от величины тяги несущего винта. Так, например, для увеличения силы тяги винта необходимо увеличить общий шаг. Увеличение шага винта сопровождается ростом момента сопротивления его вращению. Поэтому с увеличением шага винта необходимо увеличить подводимый к винту крутящий момент. Если же этого не сделать, то число оборотов несущего винта будет уменьшаться, что приведет к снижению тяги несущего винта.
Следовательно, для увеличения тяги несущего винта необходимо увеличить не только шаг винта, но и крутящий момент. Для этого в кабине летчика установлен рычаг «шаг — газ», кинематически связанный с двигателем и механизмом, изменяющим шаг винта. При перемещении рычага происходит пропорциональное изме- нение крутящего момента и шага винта и одновременно изменение реактивного момента. На одновинтовом вертолете изменение реактивного момента требует соответствующего изменения тяги рулевого винта для устра- нения разворота.
§ 15. Сила тяги рулевого винта
Величину силы тяги рулевого винта (рис. 1.60) можно определить из равенства
31
Рис. 1.60. Уравновешивание реактивного момента
растает мощность, потребляемая винтом, а следовательно, возрастает и потребная тяга, создаваемая рулевым винтом.
Рулевой винт работает в условиях косой обдувки, так как в полете плоскость его вращения не перпендикулярна к на правлени ю набегающ его по тока.
При косой обдувке жесткого винта изменяющаяся скорость потока, набегающего на его
лопасти, вызовет периодическое
изменение силы тяги каждой лопасти и приведет к возникновению вибраций.
Для выравнивания силы тяги лопастей во всех азимутах и
разгрузки лопастей от действия
изгибающих моментов лопасти реального рулевого винта крепятся к втулке при помощи горизонтальных шарниров, которые позволяют лопастям совершать маховые движения.
Наличие в конструкции втулки винта осевых шарниров обеспечивает поворот лопастей относительно про-
дольной оси, который необходим для изменения шага.
На тяжелых вертолетах вертикальные шарниры могут устанавливаться и на рулевых винтах.
§ 16. Располагаемая мощность несущего винта
В силовых установках современных вертолетов используются поршневые или турбовинтовые авиационные двигатели.
Особенностью работы поршневых авиационных двигателей воздушного охлаждения на вертолетах является
необходимость принудительной обдувки охлаждаемых поверхностей двигателя при помощи специальных вентиляторов. Принудительный обдув двигателей на вертолетах связан с недостаточными возможностями ис- пользования скоростного напора для охлаждения в поступательном полете и с отсутствием напора на режиме висения. На вертолетах с турбовинтовыми двигателями, как правило, устанавливаются вентиляторы для охлаж- дения главного редуктора, маслорадиаторов, генераторов и других агрегатов. Для привода вентиляторов за- трачивается часть мощности двигателя Noxл.
Часть мощности двигателя расходуется на преодоление трения в трансмиссии, соединяющей двигатель с
винтами N тp, на вращение рулевого винта Npв и на привод насосов гидравлической системы и других агрегатов
Nа.
Таким образом, мощность, передаваемая на несущий винт, оказывается меньше эффективной мощности
Nе , развиваемой на валу двигателя.
Если из эффективной мощности вычесть затраты, получим располагаемую мощность несущего винта Np
Np= Ne.- Noxл.- Nтp - Npв - Nа
Для различных вертолетов Np составляет 75— 85% Ne.
Иначе говоря, потери мощности на охлаждение, трансмиссию, рулевой виит и привод агрегатов составляют
15—25% эффективной мощности двигателя.
Эффективная мощность двигателя и располагаемая мощность несущего винта зависят от скорости и высоты
полета, однако ввиду небольших скоростей полета вертолета влиянием скорости на Ne и Np можно пренебречь.
Характер изменения располагаемой мощности от высоты полета зависит от типа двигателя и определяется
его высотной характеристикой (рис. 1.61).
Известно, что мощность поршневого двигателя без нагнетателя, при постоянных оборотах с подъемом на
высоту падает вследствие уменьшения весового заряда, топливовоздушной смеси, поступающей в цилиндры. Аналогично изменяется мощность, передаваемая на несущий винт (рис.1.61/а).
32
Рис. 1.61. Характер изменения располагаемой мощности несущего винта при различных типах двигателей:
а — поршневой двигатель без нагнетателя;
б — поршневой двигатель с односкоростным нагнетателем;
в — поршневой двигатель с двухскоростным нагнетателем; г — турбовинтовой двигатель
Мощность поршневого двигателя, снабженного односкоростным нагнетателем, с подъемом на высоту увеличивается до расчетной высоты вследствие увеличения весового заряда топливовоздушной смеси по причине снижения температуры окружающего воздуха и улучшения продувки цилиндров. Путем постепенного откры- вания воздушной заслонки нагнетателя давление наддува до расчетной высоты поддерживается постоянным. На расчетной высоте воздушная заслонка открывается полностью и мощность двигателя достигает максимума. Выше расчетной высоты эффективная мощность, а значит, и располагаемая мощность несущего винта уменьшаются так же, как у двигателя без нагнетателя (рис. 1.61, б).
Для двигателя с двухскоростным нагнетателем характер изменения эффективной и располагаемой мощностей от высоты полета приведен на рис. 1.61, в.
Для турбовинтового двигателя характер зависимости располагаемой мощности несущего винта от высоты полета приведен на рис. 1.61, г. Увеличение мощности турбовинтового двигателя до некоторой высоты объясняется принятой системой регулирования, обеспечивающей рост температуры газов перед турбиной до некоторой высоты.
Г л а в а 3
РАВНОВЕСИЕ, УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ ВЕРТОЛЕТА
§ 1. Оси вращения вертолета
Изучение разнообразных и сложных движений, совершаемых вертолетом в воздухе, может быть значительно упрощено, если движение вертолета представить себе состоящим из поступательного движения его центра тяжести и вращательного движения относительно центра тяжести. Кроме того, поступательное и вращательное движения вертолета можно рассматривать как сумму движений относительно трех взаимно перпендикулярных осей, проходящих через центр тяжести.
При изучении движения вертолета пользуются поточными и связанными осями координат. Оси поточной системы принимаются относительно набегающего потока. Оси связанной системы координат связаны с вертолетом и при всех поступательных и вращательных движ ен и я х п ер е м е щ а ю т с я и в р а щ аю т ся в м ест е с н и м . В данной главе будет
рассмотрено вращение вертолета относительно осей связанной системы координат. Начал о к о о р д и н ат б ер ет ся в ц е н тр е тя же сти в е р т ол е т а (рис. 1.62):
— ось ОХ — продольная ось вертолета;
— ось OY — вертикальная ось вертолета;
— ось OZ — поперечная ось вертолета.
Момент, вращающий вертолет вокруг поперечной оси, называется продольным моментом M z . Продольный момент изменяет угол, заключенный между продольной осью вертолета и линией горизонта. Этот угол называется углом тангажа и
обозначается буквой v. Продольный момент, увеличивающий угол тангажа, называется кабрирующим, а уменьшающий его — пикирующим.
Момент, вращающий вертолет вокруг продольной оси, называется кренящим моментом М х .
Момент, вращающий вертолет вокруг вертикальной оси, называется путевым моментом, или моментом рыскания My.
33
Рис. 1.62. Оси вращения вертолета
§ 2. Центровка вертолета
Положение центра тяжести оказывает большое влияние на пилотажные свойства вертолета. Положение центра тяжести вертолета относительно оси несущего винта и плоскости втулки несущего винта называется цент р ов к ой в е р т о л е т а (рис. 1.63). Центровка измеряется в миллиметрах;
+Y
Рис. 1.63. Центровка вертолета
хт — продольная центровка; ут — вертикальная центровка.
Продольная центровка считается передней, если центр тяжести вертолета расположен впереди оси вращения несущего винта, и задней, если центр тяжести расположен позади оси вращения.
При эксплуатации вертолета вследствие различной загрузки, выгорания топлива, сбрасывания грузов и т. п.
центровка может существенно изменяться. В инструкции для каждого вертолета указаны пределы эксплуатационных центровок — предельно передняя и предельно задняя. Для того чтобы центровки не выходили за пределы допустимых,
вертолет необходимо загружать согласно инструкции по указанным на вертолете меткам. Если груз невозможно разместить по имеющимся меткам, то необходимо проверить, не выходит ли центровка вертолета за пределы допустимых. Для этого выполняется расчет следующим образом. Предположим, что исходный вес вертолета — G, а его центровка хт (рис. 1.64).
34
Требуется поместить на расстоянии а от оси вращения несущего винта груз q. Новое положение центра тяжести Q1 есть точка приложения равнодействующей (G + q).
Напишем равенство моментов относительно точки О, где точка О исходное положение центра тяжести вертолета.
Если расчет покажет, что новая центровка вертолета не выходит из диапазона эксплуатационных центровок, то перевозка дополнительного груза на вертолете допустима.
§ 3. Равновесие (балансировка) вертолета
Установившийся полет на вертолете может совершаться при полном равновесии всех сил и моментов, действующих на него.
Р а в н о в ес и ем вертолета называется такое состояние, при котором его центр тяжести неподвижен или
движется равномерно и прямолинейно и вертолет не вращается вокруг своих осей.
Для того чтобы центр тяжести вертолета двигался равномерно и прямолинейно, должно быть выполнено условие: сумма всех сил, действующих на вертолет, равна нулю (Сумма Р = 0). Чтобы вертолет не вращался
относительно центра тяжести, должно быть выполнено условие: сумма всех моментов, действующих на вертолет, равна нулю (Сумма М = О).
Для облегчения изучения равновесие вертолета рассматривается отдельно относительно каждой из трех осей. Соответственно осям различают три вида равновесия: продольное, поперечное и путевое. При продольном равновесии уравновешены моменты, действующие относительно поперечной оси. При поперечном равновесии уравновешены моменты, действующие относительно продольной оси. При путевом равновесии уравновешены моменты, действующие относительно вертикальной оси.
Следует иметь в виду, что все три вида равновесия тесно связаны между собой. Это значит, что достаточно
нарушить равновесие относительно какой-либо одной оси, как нарушается равновесие относительно других осей.
Например, если в результате нарушения продольного равновесия вертолет перешел в пикирование, то это приведет к возрастанию скорости. Увеличение скорости приведет к увеличению завала конуса вправо и к увеличению тяги рулевого винта. Вертолет будет крениться и разворачиваться вправо.
35
§ 4. Устойчивость вертолета
Полет вертолета всегда сопровождается непрерывным нарушением равновесия, что приводит к изменению характера его движения. В полете на вертолет действуют неуравновешенные силы и моменты, называемые возмущением.
Устойчивость в е р т о л е т а — способность его самостоятельно, без вмешательства летчика возвращаться к исходному режиму полета после прекращения действия возмущения. Условно устойчивость вертолета разделяют на
статическую и динамическую.
Ст ат ич еск а я у ст о йч ив о сть характеризуется стремлением вертолета после прекращения действия возмущения
возвратиться в исходный режим полета. Предположим, что под действием порыва ветра вертолету сообщена угловая скорость со относительно какой-либо оси (рис. 1.65, а). После прекращения действия возмущения угловая скорость достигла величины w1, а в дальнейшем под действием восстанавливающего момента вертолет стремится вернуться к исходному состоянию равновесия, при котором w = О. Следовательно, вертолет статически устойчив. Эта устойчивость статической называется потому, что она рассматривает только само стремление вертолета вернуться к исходному режиму, но не рассматривает действие на вертолет инерционных сил и моментов и характер дальнейшего движения вертолета.
Д ина м ич е с к а я у с т о й ч и в о с т ь характеризуется
последующим характером движения вертолета и его конечным результатом. Если рассматриваемый вертолет, совершая колебания относительно исходного положения равновесия, в дальнейшем будет все больше и больше отклоняться от равновесного положения, уве- личивая, например, свою угловую скорость, то он будет динамически неустойчивым (рис. 1.65, а). Данный график отражает статически устойчивый и динамически неустойчивый вертолет.
На рисунке 1.65, б дан график для вертолета, обладающего как
статической, так и динамической, устойчивостью. На рис. 1,65, в дан график для вертолета, который как статически, так и динамически неустойчив.
В связи с тем что равновесие вертолета рассматривается относительно трех осей, то и устойчивость различают трех
видов: продольную, поперечную и путевую.
§ 5. Управляемость вертолета
У п р а в л я ем о ст ь ю называется способность вертолета по воле летчика изменять режим полета и свое положение в воздухе.
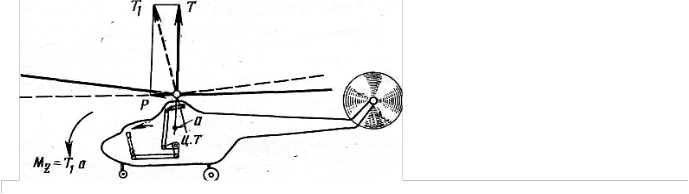
Управлять вертолетом — значит восстанавливать нарушенное равновесие или нарушать его при переходе на другой режим полета. Летчик имеет возможность «нарушать» три вида равновесия.
Рис. 1.66. Принцип продольного управления вертолетом
Поэтому и различают три вида управляемости:
продольную, поперечную и путевую.
Продольное и поперечное управление осуществляется ручкой управления, при помощи которой летчик имеет возможность, изменять наклон силы тяги несущего винта.
Так, например, при даче ручки от себя плоскость вращения несущего винта, а следовательно, и сила тяги наклонятся вперед (рис. 1.66). Составляющая сила Р вызовет ускорение вертолета в направлении оси ОХ, а момент силы Т 1 называемый моментом управления,
создаст пикирующий момент относительно поперечной оси М г = Т1 а.
Таким образом, отклоняя ручку на себя или от себя, летчик осуществляет продольное управление вертолетом.
При отклонении ручки влево или вправо обеспечивается поперечное управление вертолетом. Так, например, при отклонении ручки влево наклонится влево сила тяги. Составляющая силы тяги Z вдоль оси OZ вызовет боковое перемещение вертолета, а сама сила T1 относительно продольной оси создаст момент, кренящий вертолет влево (рис. 1.67), Мкр=Т1а.
Путевое управление вертолетом обеспечивается ножным управлением. Педали ножного управления установлены впереди сиденья и кинематически связаны с лопастями рулевого винта, так что при их отклонении изменяются установочные углы лопастей, а следовательно, и тяга рулевого винта.
Так , н апр и мер , если н ажать на ле вую пе даль , т о при. этом уменьшаются установочные углы лопастей, а следовательно, уменьшается и сила тяги рулевого винта. В этом случае момент силы тяги рулевого винта относительно
центра тяжести вертолета М РВ = ТРВ LРв . становится меньше реактивного момента, и вертолет под действием избытка реактивного момента начнет поворачиваться влево (рис. 1.68, а).
36

Для разворота вертолета вправо летчик отклоняет правую педаль и этим увеличивает установочные утлы лопастей рулевого винта. При этом момент от тяги рулевого винта становится больше реактивного момента и под действием избытка момента тяги рулевого винта вертолет начнет разворачиваться вправо (рис. 1.68,6).
Рис. 1.67. Принцип поперечного управления вертолетом
Для изменения вертикальной скорости необходимо изменить величину силы тяги несущего винта. Для этой цели в кабине устанавливается ручка «шаг — газ», при помощи которой одновременно изменяются шаг всех лопастей несущего винта и мощность двигателя.
Из сказанного следует, что для осуществления управления вертолетом необходимо изменять величину и направление
силы тяги несущего винта. Наиболее распространенным способом управления несущим винтом является управление с помощью автомата перекоса.
§ 6. Принцип действия автомата перекоса
Автомат перекоса представляет механизм, позволяющий путем соответствующего изменения углов установки (шага) лопастей изменять величину и направление тяги несущего винта.
На рисунке 1.69 приведена принципиальная схема
управления несущим винтом одновинтового вертолета. Автомат перекоса имеет ползун 1, который может пе- ремещаться вверх и вниз. Для перемещения ползуна служит рычаг «шаг — газ» 2, соединенный с ним при
помощи тяг 3 и качалки 4. Рычаг «шаг —
газ» устанавливается в кабине слева от сиденья летчика.
На ползуне устанавливается универсальный шарнир, который имеет два кольца: внутреннее 5 и наружное 6. Универсальный шарнир (шарнир Гука) связан с ручкой управления 7 (ручка циклического шага), расположенной в кабине перед сиденьем летчика. При отклонении ручки летчик, воздействуя на внешнее кольцо, имеет возможность наклонять его относительно двух взаимно перпендикулярных осей вперед — назад и влево — вправо.
При помощи шарикового подшипника к внешнему кольцу
шарнира крепится тарелка автомата перекоса. Тарелка состоит из вращающегося кольца 8 с рычагами 9, к которым крепятся тяги 10, связанные с поводками 11 осевых шарниров лопастей. Тарелка автомата перекоса приводится во вращение двухзвенником 12, одно звено которого шарнирно связано с вращающимся кольцом, а второе — с валом несущего винта.
Отклонение рычага «шаг — газ» вверх или вниз приводит соответственно к увеличению или уменьшению установочных углов всех лопастей несущего винта на одинаковую величину. На рис. 1.69 видно, что при перемещении рычага общего
шага вверх перемещается вверх и тарелка автомата перекоса, а шаг лопастей несущего винта и сила тяги увеличиваются. Таким образом, отклонение рычага «шаг — газ» изменяет силу тяги несущего винта по величине.
При наклоне тарелки автомата перекоса обеспечивает циклическое изменение шага, т. е. изменение угла
установки лопасти в течение одного цикла (одного оборота).
Рассмотрим упрощенную схему управления несущим винтом при помощи автомата перекоса (рис. 1.70, а). Допустим, что при отклонении ручки тарелка автомата перекоса наклонилась так, что в азимутальном положении 180° шаг лопасти уменьшился на угол —??, а в положении 0° увеличился на угол + ??. На рис. 1.70, б графически показана
зависимость изменения шага лопасти по азимуту при
Уменьшение шага
37
азимутальном положении.
наклонной тарелке автомата переко са. И з графи ка ви дно , чт о в ази муте ? =0 шаг будет максимальным. От азимута 0 до
90° шаг будет уменьшаться и при ? = 90°
будет равен исходному значению ? 0 . От азимута 90 до 180° шаг продолжает умень- шаться и при ? =180° будет минимальным. От азимута 180 до 270° шаг возрастает до исходного значения и от ? =270 до 0° шаг возрастает до максимального.
В левой половине ометаемой поверхности
(от 0 до 180°) вследствие уменьшения шага уменьшается подъемная сила лопасти и
лопасть опускается (взмахивает вниз). В правой половине ометаемой поверхности (от 180 до 360°), где шаг лопасти увеличивается, лопасть поднимается (взмахивает вверх).
В результате циклического изменения шага лопасть при вращении начнет совершать маховые движения. При этом
след общего движения (вращательного и махового) какого-либо сечения будет лежать в новой плоскости, наклоненной относительно исходной плоскости на некоторый угол вперед. За счет влияния скорости взмаха V В3 углы атаки лопастей, несмотря на циклическое изменение шага, остаются почти постоянными (рис. 1.71). Поэтому примерно постоянной будет подъемная сила лопасти в любом
Рис. 1.71. Углы атаки лопастей при циклическом изменении шага.
Таким образом, наклон тарелки автомата перекоса вызывает наклон плоскости вращения несущего винта, а значит, и наклон силы тяги несущего винта при сохранении ее величины.
Для того чтобы управление вертолетом
сообразовывалось с движениями летчика, автомат перекоса должен обеспечивать наклон плоскости вращения винта в том направлении, в котором отклоняется ручка управления. При рассмотрении
циклического изменения шага лопасти не учитывалось влияние инерционных сил на наклон плоскости вращения. В
действительности наклон плоскости вращения винта отстает от циклического изменения шага. Там, где шаг
минимальный, лопасть опускается с наибольшей скоростью и, несмотря на то что при дальнейшем вращении шаг увеличивается, по инерци и п р одолжае т оп ускаться. Точн о так же там, где шаг после наибольшего значения начинает уменьшаться, лопасть продолжает взмахивать вверх.
В связи с запаздыванием наклона плоскости вращения винта циклическое изменение шага требуется производить с
некоторым упреждением по азимуту. Для этой цели рычаги, которыми ручка управления вертолета связана с наружным кольцом шарнира автомата перекоса (рис. 1.69, позиция 6), предварительно смещаются против вращения на угол ?А.н, называемый углом опережения автомата перекоса (рис. 1.72). Величина угла опережения зависит от инертности лопасти, которая определяется
Рис. 1.72. Угол опережения автомата перекоса
массовой характеристикой лопасти и упругостью ее, от угла характеристики компенсации взмаха ?1 и угла выноса t. Углы ?1 и t отсчитываются от шарнира А на тяге разворота лопасти.
Если отклонить ручку управления, например, вперед, то при наличии угла опережения тарелка автомата перекоса
38
наклонится вперед и влево, но плоскость вращения, а соответственно и сила тяги винта наклонятся только вперед. При отклонении ручки, например, влево тарелка автомата перекоса отклонится одновременно влево и назад, а сила тяги наклонится только влево. Таким образом, угол опережения автоматически учитывает запаздывание наклона плоскости вращения, поэтому автомат перекоса обеспечивает наклон плоскости вращения в том направлении, в котором отклоняется ручка управления.
§ 7. Принцип управления вертолетами различных схем
В параграфе 5 данной главы был рассмотрен принцип управления вертолетом одновинтовой схемы. Ознакомимся с принципом управления вертолетами других схем.
Соос н а я сх ем а. Продольное и поперечное управление вертолетов этой схемы, так же как и одновинтовой, достигается соответствующим наклоном силы тяги винта при помощи ручки управления. Обычно меняют наклон плоскости
вращения обоих винтов синхронно во избежание сближения концов лопастей.
Путевое управление вертолетов соосной схемы достигается дифференциальн ы м (не о д ина ко вым) изменением общего шага верхнего и нижнего несущих винтов. При не отклоненных педалях реактивные моменты винтов взаимно уравновешиваются (рис. 1.73). Если шаг одного винта
увеличить, а другого соответственно уменьшить, то при неизменной суммарной тяге равновесие реактивных моментов нарушится и вертолет начнет разворачиваться в сторону действия большего реактивного момента. Так, например, если нажать на правую педаль, то при этом увеличатся общий шаг и реактивный момент верхнего винта, имеющего левое вращение (если смотреть со стороны привода), а шаг и, следовательно, реактивный момент нижнего винта с правым вращением уменьшатся и вертолет развернется вправо.
П р о д о л ь на я с х ем а. Продольное управление
вертолетов этой схемы достигается наклоном силы тяги обоих винтов вперед или назад с дифференцированным изменением общего шага (рис. 1.74), а поперечное управление осуществляется наклоном силы тяги обоих винтов влево или вправо. Путевое управление дости- гается наклоном сил тяги переднего и заднего винтов в различные стороны (рис. 1.75), горизонтальные состав- ляющие Рг дают момент РТ1, разворачивающий вертолет относительно вертикальной оси.
Рис. 1.74. Продольное управление вертолетом продольной схемы
П о пе ре ч н а я сх е м а . Продольное управление осуществляется наклоном силы тяги обоих винтов вперед или назад. Поперечное управление осуществляется дифференцированным изменением общего шага винтов.
Путевое управление осуществляется продольным наклоном силы тяги несущих винтов в противоположные стороны
(рис. 1.76), вследствие чего получаются горизонтальные составляющие Р г , которые и создают момент Р Т 1 относительно путевой оси.
§ 8. Усилия на командных рычагах
Отклоняя ручку управления и педали для обеспечения управления вертолетом, летчик прилагает определенные усилия, которые необходимы для преодоления моментов аэродинамических и инерционных сил лопастей относительно осевых шарниров. Величина усилия зависит от скорости полета вертолета, степени его устойчивости и центровки вертолета.
На статически устойчивом вертолете с увеличением скорости полета усилия на ручке возрастают. Это объясняется тем, что с ростом скоростей возрастают шарнирные моменты.
С увеличением степени устойчивости вертолета усилия на командных рычагах увеличиваются. Это объясняется тем, что устойчивость и управляемость в известной степени являются противоположными сторонами одного и того же
свойства. Действительно, если вертолет чрезмерно устойчив, то требуется больший ход командных рычагов для изменения режима полета.
При изменении центровки вертолета изменяется наклон фюзеляжа. Если в полете, например, центровка станет более задней, то увеличится угол тангажа. В этом случае, для того чтобы составляющая тяги вдоль траектории не
уменьшилась, летчику потребуется увеличить отклонение ручки вперед, что вызовет увеличение усилий на ручке.
На вертолетах для обеспечения нужного изменения усилий на ручке в проводке продольного и поперечного управления часто применяют пружины (загрузочные механизмы), загружающие ручку. На таких вертолетах для отклонения ручки летчик должен приложить определенное усилие.
Величина шарнирного момента лопасти зависит также от ее азимутального положения, поэтому на автомат перекоса действуют переменные по азимуту шарнирные моменты, вызывающие дерганье, вождение и тряску ручки управления, что ухудшает управляемость вертолета.
Предварительная затяжка пружин загрузочных механизмов дает возможность не ощущать на ручке возникающие
небольшие периодические силы. Для устранения вибраций на легких вертолетах в проводке управления ставятся (вблизи автомата перекоса) демпферы. Демпферы могут быть инерционного или гидравлического типа.
По мере увеличения диаметра несущего винта усилия на ручке управления возрастают и могут достигать больших величин, затрудняющих управление вертолетом.
§ 9. Гидроусилители (бустеры)
Для уменьшения усилий на командных рычагах, возникающих при управлении, на вертолетах в систему управления включают гидроусилители (бустеры).
усилия от шарнирных моментов, переместится в направлении движения золотника.
На рисунке 1.77 показано включение гидроусилителя по так называемой необратимой схеме. Гидроусилитель состоит из силового цилиндра 1 с поршнем и распределительного золотникового устройства 2. Цилиндр гидроусилителя крепится к каркасу вертолета и штоком кинематически связан с проводкой управления автома- том перекоса. Ручка управления вертолета связана с золотником распределительного устройства. Летчик при отклонении ручки управления передвигает золотник, который перепускает жидкость в соответствующую полость цилиндра гидроусилителя. Под действием давления поступившей жидкости шток гидроусилителя, преодолевая
При включении гидроусилителя по необратимой схеме шарнирный момент полностью воспринимается гид- роусилителем и на ручку управления усилия не передаются. Для перемещения ручки летчиком прикладывается усилие, необходимое лишь для преодоления трения при перемещении золотника. Это усилие очень мало и не зависит от угла отклонения ручки и режима полета. Так как в этой схеме исключена передача пульсирующих нагрузок на ручку управления, то на таких вертолетах отпадает необходимость применения специальных демпферов в системе управления.
В связи с тем что изменение режима полета определяется летчиком по изменению усилий на командных
рычагах, отсутствие таких усилии лишает летчика возможности судить об изменении режима полета, Поэтому, чтобы летчик мог судить о характере изменения режима полета по усилиям на ручке, в систему управления вертолетом включают пружинные загрузочные механизмы.
Для удобства пилотирования необходимо, чтобы усилие, создаваемое загрузочным механизмом, с увеличением
отклонения командных рычагов возрастало.
Загрузочный механизм состоит из одной или нескольких пружин, которые летчик сжимает, отклоняя командный рычаг (рис. 1.78). Отклоняя ручку от себя, летчик сжимает левую пружину загрузочного механизма. При взятии ручки на себя летчик будет сжимать правую пружину.
Летчик всегда испытывает усилие на ручке, если она не
находится в нейтральном положении, так как в этом случае будет сжата одна из пружин загрузочного механизма. Чтобы
снять усилия с командных рычагов, в систему управления включают электромеханизм триммерного эффекта
(механизм триммера).
Принцип работы триммера заключается в следующем (рис. 1.78). Корпус загрузочного механизма через качалку соединен с механизмом триммерного эффекта. В зависимости от направления вращения электродвигателя шток механизма триммера может перемещаться влево или вправо, перемещая корпус загрузочного механизма. Перемещение корпуса загрузочного механизма изменяет натяжение пружины, и при нейтральном его положении усилие с командного рычага полностью снимается.
Для удобства пользования кнопка управления триммером ручного управления находится на ручке, а гашетку триммера ножного управления, как правило, располагают на педалях.
§ 10. Основные характеристики управляемости
Об управляемости вертолета судят по ряду показателей: эффективности управления, чувствительности к управлению, запаздыванию в управлении. Рассмотрим эти показатели.
Э ффе ктивно сть у п р а в л е н и я . По д эф фективностью управления понимают способность вертолета создавать
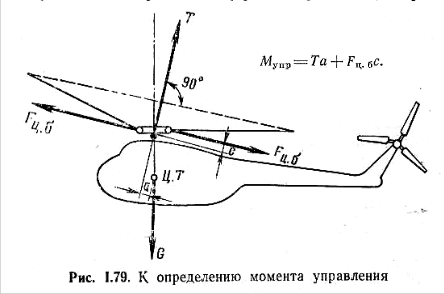
моменты при отклонении командных рычагов. Так, например, при отклонении ручки на себя происходит наклон плоскости вращения винта и сила тяги несущего винта относительно центра тяжести создает момент управления, равный М упр = Та (рис. 1.79). При наклоне плоскости несущего винта с разнесенными горизонтальными шарнирами центробежные силы создают дополнительный момент, равный F ц.б С,и суммарный момент управления равен
Степень эффективности управления оценивается величиной момента управления, возникающего при отклонении тарелки автомата перекоса на 1°.
Чем больше степень эффективности управления, тем меньший требуется угол отклонения тарелки автомата перекоса для получения нужного момента. Раньше указывалось, что на величину отклонения ручки (тарелки автомата перекоса)
большое влияние оказывает центровка вертолета. Если, например, центровка станет более задней, то для сохранения заданной скорости полета необходимо увеличить угол отклонения тарелки. Так как тарелка автомата перекоса имеет предельные углы отклонения, то при некоторой задней центровке, превышающей предельно заднюю, тарелка упрется в упоры и управлять вертолетом станет невозможно.
Для гарантии обеспечения эффективности управления вертолетом на всех режимах предельно возможные отклонения командных рычагов должны быть несколько больше максимально потребных. Разница между предельно возможными и максимально потребными отклонениями органов управления называется запасом управления.
При увеличении степени эффективности управления запас управления увеличивается, поэтому при данном диапазоне
отклонения командных рычагов диапазон эксплуатационных центровок также увеличивается.
Из рисунка 1.79 видно, что эффективность управления вертолетом увеличивается с увеличением расстояния от винта до центра тяжести вертолета, а также с увеличением разноса горизонтальных шарниров.
Большое влияние на эффективность управления оказывают обороты несущего винта, от которых зависит тяга
винта. Так, уменьшая обороты несущего винта приблизительно на 20%, уменьшаем эффективность управления до
40%.
Чу в с т в и т е л ь нос т ь к у п р а в л е н и ю . Н а ли чие моментов управления еще не свидетельствует о хорошей управляемости вертолета, так как при достаточной эффективности управления вертолет может очень вяло реагировать на отклонение командных рычагов. Для характеристики скорости изменения положения вертолета в пространстве при отклонении командных рычагов вводят понятие чувствительности к управлению.
Под чувствительностью к управлению вертолета понимается его способность приобретать определенную угловую скорость вращения при отклонении соответствующих командных рычагов.
При отклонении ручки появляется момент управления, под действием которого вертолет, преодолевая инерцию, начнет вращаться с постепенно возрастающей угловой скоростью. С увеличением угловой скорости вращения будет увеличиваться и противодействующий этому вращению демпфирующий момент. Физический смысл возникновения этого момента заключается в том, что при вращении во всех точках вертолета возникают дополнительные составляющие скорости потока, направленные в противоположную сторону вращения. При наличии этих скоростей на различные части вертолета будут действовать дополнительные аэродинамические силы, которые относительно центра тяжести вертолета и создают демпфирующий момент, препятствующий его вращению.
При определенной угловой скорости вращения вертолета момент управления сравняется по величине с демпфирующим моментом, после чего вертолет начинает вращаться с постоянной скоростью, так как сумма моментов, действующих на вертолет, равна нулю. Эта установившаяся угловая скорость и характеризует чувствительность к управлению.
Количественно чувствительность к управлению оценивается величиной угловой скорости вращения вертолета, возникающей при отклонении тарелки автомата
41
перекоса на 1°, т. е. отношением.
Из рассмотренного видно, что чем выше эффективность управления при неизменных демпфирующих свойствах
вертолета, тем больше чувствительность управления. Следует иметь в виду, что вертолет с высокой чувствительностью очень «строгий» в управлении и возможна его раскачка при пилотировании. Увеличение демпфирующих свойств вертолета при неизменной эффективности уменьшает чувствительность к управлению.
Значительное влияние на чувствительность к управлению оказывает момент инерции вертолета. Чем больше момент
инерции, тем больше требуется времени для достижения максимальной скорости вращения и чувствительность вертолета к управлению уменьшается.
3апаздывание в управлении. Вертолет реагирует на отклонение ручки управления с некоторым запаздыванием. Запаздывание в управлении объясняется тремя причинами.
Во-первых, наклон конуса вращения происходит не мгновенно, так как лопасти обладают большой инертностью и упругостью. Во-вторых, несколько запаздывает изменение направления воздушного потока, протекающего через несущий винт. В-третьих, во время наклона плоскости вращения воздушный поток, отбрасываемый винтом, становится более возмущенным, что приводит к дополнительному вихреобразованию, а значит, и к задержке установления нового направления силы тяги.
Так, например, при отклонении автомата перекоса вертолета Ми-4 тяга несущего винта займет новое установившееся положение лишь через 0,3 сек.
§ 11. Несоконусность лопастей и способы ее устранения
Под соконусностью лопастей понимается такая их работа, когда при вращении несущего винта каждая из. лопастей в одном и том же азимуте проходит на одинаковой высоте, т. е. все лопасти при вращении занимают положение образующих одного конуса.
Обычно установленный на вертолете несущий винт не имеет соконусности, и чтобы ее обеспечить, необходимо регулировать лопасти.
Причиной несоконусности является различие подъемных сил, создаваемых каждой из лопастей при вращении несущего винта. Неравенство подъемных сил приводит к смещению равнодействующей подъемных сил лопастей от оси несущего винта, что даже при осевом обтекании вызывает тряску вертолета.
Для проверки соконусности лопастей несущего винта вертолет закрепляется на привязи, концы лопастей окрашиваются в разные цвета. Запускается двигатель и пр и о пре д е л е нн ы х о б о р о т а х к не с у щ е м у в инт у (рис.
1.80) подносится штанга с прикрепленной к ее верхней части плотной бумагой, на которой отбиваются следы лопастей.
По расстоянию между следами на бумаге судят о соконусности лопастей. Если это расстояние больше до- пустимого, его необходимо довести до нормы.
Очевидно, нижнюю отметку оставляет лопасть,
имеющая наименьшую подъемную силу, а верхнюю
— лопасть, развивающая наибольшую подъемную
силу.
это следующим.
Выравнивание подъемных сил производится изменением углов установки лопастей. Это достигается изменением длины тяг, идущих от поводка осевого шарнира к автомату перекоса.
Благодаря деформации лопастей соконусность, полученная на одних
оборотах, может перейти в несоконусность на других оборотах. Объясняется
Вследствие несовпадения центра давления лопасти с центром жесткости лопасть наряду с изгибом испытывает кручение. Кручение лопасти приводит к изменению угла устано вки, а следовательно , и подъемной с ил ы л о па с т и. С из м е н е н и е м р е ж им а ра б о т ы в ин та изменяется положение центра давления лопасти, меняется положение центра д ав лен и я ло п аст и , а з н ачи т , и величина крутящего момента. В случае неодинаковой жесткости лопастей углы установки их становятся различными. Поэтому отрегулированные лопасти на одном режиме работы могут дать несоконусность на других режимах..
Для у стр ан е ни я этого явления на концах лопастей современных несущих винтов устанавлива- ются специ-
альные тонкие пластинки, называемые аэродинамическими компенсаторами или триммерны- ми пластинками.
Отгибая триммерную пластинку, можно изменить величину крутящего момента лопасти. Так, например, если лопасть уходит от среднего положения вверх, то пластинку необходимо отогнуть вниз. Вследствие этого центр давления лопасти смещается назад, что увеличивает закрутку лопасти в сторону уменьшения установочного угла.
Таким образом, триммериая пластинка позволяет регулировать угол взмаха лопасти для получения окончательной
соконусности.
Определение несоконусности тяжелых вертолетов производится фотографированием лопастей при вращении в ин т а н а з е м л е и в п о л е т е . Д л я э т о г о с п е циальный фотоаппарат устанавливают в кабине так, чтобы его объектив был направлен на конец лопасти (рис. 1.82).
Относительное положение изображений концов лопастей на фотопленке позволяет определить необходимое регулирование для обеспечения соконусности несущего винта.
Для выбора наиболее рационального варианта регулирования в инструкции по эксплуатации данного
42
вертолета приводятся рекомендации, определяющие потребные изменения длины тяг и угла отгиба триммерных пластинок.
В инструкции также указываются и нормы, характеризующие удовлетворительную соконусность.
РАЗДЕЛ II
УСТАНОВИВШИЕСЯ РЕЖИМЫ ПОЛЕТА ВЕРТОЛЕТА


Для удобства изучения режимов полета вертолета их можно разделить на два вида: у с т а н о в и в ш и е с я и н е у с т а н о в и в ш и е с я . К установившимся режимам полета мы будем относить такие режимы, при которых скорость полета не меняется ни по величине, ни по направлению. В неустановившихся режимах полета скорость изменяется.
К установившимся режимам относятся следующие режимы: висение, вертикальный набор высоты, вертикальное снижение, горизонтальный полет, набор высоты по наклонной траектории, планирование с работающим двигателем и планирование при самовращении несущего винта.
Следует заметить, что «чистого» установившегося режима полета не существует, ибо в перечисленных режимах есть небольшие изменения скорости, связанные с перемещением воздушных масс и с другими факторами , но мы их учит ывать не б удем.
Г л а в а 1
РЕЖИМ ВИСЕНИЯ
§ 1. Балансировка вертолета на режиме висения
На рисунке II.1 показаны силы и моменты, действующие на вертолет на режиме висения.
Основные силы и моменты будут следующие: сила веса G, сила тяги несущего винта Т, сила тяги рулевого винта ТРВ , аэродинамическая сила стабилизатора R CТ , реактивный момент несущего винта M Р , моменты от осевых (центробежных )
си л лопастей, вызванн ые разносом горизонтальных шарниров М ГШ и М Г.Шz
Условиями неподвижного висения являются:
1. Y=G — условие постоянства высоты (силу RСТ не учитываем из-за малых ее значений);
2. TZ +G 2 = TРВ — условие отсутствия сноса;
3. Tz b + M ГШ =ТРВ h — условие отсутствия поворота относительно продольной оси;
4. Ya=RCТLCT + М ГШ —условие отсутствия поворота относительно поперечной оси;
5. М р = Трв. Lр. в — условие отсутствия поворота относительно путевой оси.
На одновинтовых вертолетах ось рулевого винта обычно расположена ниже плоскости вращения втулки несущего винта, что дает некоторое уменьшение длины концевой балки. В результате балансирование вертолета на висении возможно лишь при небольшом правом крене.
Это видно из того, что выполнение условия 3 требует, чтобы TP ,B >TZ (ибо b>h), поэтому для выполнения условия 2 необходимо наличие силы G 2 .
Следует также заметить, что сила R CT , возникающая при обдуве на висении, создает ощутимый кабрирующий момент.
43
В поступательном полете из-за наклона силы тяги несущего винта вперед фюзеляж вертолета наклоняется, что увеличивает его лобовое сопротивление. Поэтому для уменьшения лобового сопротивления фюзеляжа, как правило, ось вала несущего винта конструктивно наклоняется вперед на 4—6°. Это требует на режиме висения наклона плоскости вращения несущего винта * не только вправо (для уравновешивания тяги рулевого винта Тр . в ), но иногда назад. Степень наклона назад зависит от центровки вертолета.
При более передней центровке вертолет висит с опущенным носом, при более задней — с приподнятым носом. Но так
как для обеспечения режима висения необходимо, чтобы сила тяги несущего винта была направлена вертикально, то при более передней центровке наклон плоскости вращения несущего винта назад увеличивается.
Наклон плоскости вращения обеспечивается ручкой циклического шага (ручкой управления), поэтому по расходу
ручки управления (для обеспечения режима висения) можно судить о центровке вертолета. При отклонении ручки происходит сжатие пружин загрузочных механиамов. Так как в процессе балансировки вертолета триммерами усилия на ручке и педалях дово дятся до нуля, то понятно, что чем больше отклонена ручка или педаль, тем больше требуется перемещение механизма триммера для снятия усилий с командного рычага. Поэтому в конечном итоге о нормальной центровке вертолета можно судить по расходу триммеров для балансировки вертолета на режиме висения.
Для каждого вертолета в инструкции указывается, на какие деления должны быть отклонены соответствующие триммеры при балансировке вертолета с данной центровкой на режиме висения.
§ 2. Потребная мощность при висении
Мощность, необходимая для совершения данного режима, называется п отр е бн ой .
Потребная мощность при висении (NBИС ) вертолета складывается из индуктивной мощности (N инд ) и про- фильной мощности (Nnp ), расход мощности на трансмиссию и рулевой винт для упрощения не учитывается. Индуктивной м о щ н о с т ь ю называется мощность, необходимая для создания силы тяги несущего винта. Для создания силы Т (рис. II. 1) воздуху необходимо сообщить индуктивную скорость подсасывания u1 , при этом затрачивается мощность
44
* Под плоскостью вращения несущего винта мы будем понимать плоскость вращения концов лопастей. верхность.
Ранее было показано, что при висении
Nинд=Ти1/75л.с.
Из. формулы видно, что с увеличением высоты висения и увеличением удельной нагрузки индуктивная скорость возрастает. Большую индуктивную скорость при данных оборотах можно создать, лишь увеличив шаг винта. Поэтому для увеличения высоты висения необходимо увеличивать общий шаг.
Аналогично изменению индуктивной скорости u1 меняется и индуктивная мощность (Nинд). Таким образом, индуктивная мощность растет с увеличением высоты, удельной нагрузки и температуры (при повышении температуры падает плотность воздуха).
П р о ф ил ь но й м о щ но сть ю называется мощность, необходимая для преодоления профильного со-
противления лопастей при вращении винта. Профильное сопротивление лопасти при висении в основном зависит от
угла ее атаки и плотности воздуха (скорость вращения принимается постоянной). С увеличением высоты висения угол атаки возрастает вследствие роста потребной индуктивной скорости, необходимой для сохранения постоянной тяги, при уменьшающейся плотности воздуха. Профильная мощность от высоты висения практически не зависит, так к ак и з м е н ен и е у гл а ат ак и с высотой компенсируется изменением плотности воздуха.
Учитывая, что NBИC = Nинд + Nпр, ВИДИМ, ЧТО ПО требная мощность висения с поднятием на высоту увеличивается (рис. II.2). Аналогично изменяется NBИC при повышении температуры, ибо температура влияет на плотность воздуха. Поэтому летом потребная мощность висения больше, чем зимой.
§ 3. Работа рулевого винта при висении
Для преодоления момента сил сопротивления несущего винта к винту подводится крутящий момент от силовой установки, равный 
где п — число оборотов несущего винта в минуту.
Реактивный момент, приложенный к вертолету, равен крутящему моменту М р = М кр , но противоположен по направлению. Реактивный момент M р уравновешивается моментом тяги рулевого винта (рис. 11.1)
Так как с увеличением высоты висения и взлетного веса вертолета растет потребная мощность (Nвис ) и реактивный момент, значит, должна расти и тяга рулевого винта. Поэтому, чем больше высота висения и взлетный вес, тем больше и нагрузка на рулевой винт, а следовательно, больше расход педали.
§ 4. Влияние «воздушной подушки» на тягу несущего винта и потребную мощность висения
При работе винта в непосредственной близости земли плотность воздуха под винтом несколько повышается, что дает возможность получить необходимую тягу при меньшей мощности двигателя или при имеющейся мощности развить большую тягу.
Увеличение тяги несущего винта, связанное с влиянием близости земли, называется эффектом «воздушной подушки». На рис. II.3 показано изменение относительной тяги несущего винта в зависимости от относительной
45
высоты висения, где:
То — тяга несущего винта без учета влияния «воздушной подушки»;
Н — высота висения;
D — диаметр несущего винта.
Из графика видно, что практически влияние «воздушной подушки» наблюдается при работе винта на расстоянии от земли, меньшем, чем диаметр несущего винта.
§ 5. Устойчивость и управляемость вертолета при висении
На режиме висения вертолет обладает статической устойчивостью. Причина этого заключается в следующем. Если, например, фюзеляж получит крен (рис. II.4, позиция 1), то возникнет составляющая веса, которая будет перемещать вертолет в сторону крена. При этом перемещении возникнут маховые движения лопастей, которые приведут к завалу конуса вращения несущего винта и наклону фюзеляжа в обратную сторону. Составляющая веса G 2 (рис. П.4, позиция 2) теперь будет направлена в противоположную сторону. Вертолет начнет двигаться обратно, но снова завал конуса вращения несущего винта наклонит фюзеляж в противоположную сторону (рис. П.4, позиция 3) и
т. д. Такое суммарное действие восстанавливающих свойств сил веса и несущего винта оказывается слишком большим, и колебания становятся
незатухающими. Вертолет раскачивается подобно маятнику. При этом мы не учитываем изменение тяги рулевого винта, вызванное движениями
в сторону крена, которое приводит еще и к разворотам вертолета.
Аналогичная картина получается при изменении угла тангажа.
Таким образом, на режиме висения вертолет не обладает динамической устойчивостью. Поэтому для восстановления нарушенного равновесия необходимо вмешательство летчика.
Для обеспечения висения одновинтового вертолета ручка управления удерживается наклоненной вправо, сильно подается правая педаль и ручкой общего шага поддерживается необходимая высота висения.
Так как на положение вертолета при висении влияет центровка вертолета, то для обеспечения висения при различных центровках требуется разный продольный ход командного рычага.
Наименьший запас управления на себя получается при висении с предельно передней центровкой и ветре сзади. Наименьший запас путевого управления вправо получается при увеличении взлетного веса, высоты висения и ветра с
правой стороны.
Влияние ветра объясняется следующим. При ветре справа уменьшается секундная масса воздуха, проходящая через рулевой винт слева направо. В результате падает тяга рулевого винта и вертолет под действием реактивного момента начинает разворачиваться влево. Для устранения этого разворота требуется дополнительная подача правой
педали, чтобы увеличить тягу рулевого винта.
В заключение следует указать, что висение производится против ветра. Объясняется это тем, что при предельно передней центровке и ветре сзади может полностью использоваться запас хода ручки на себя. В этом случае не будет расхода ручки для парирования внезапных порывов ветра. Из этих же соображений висение с боковым ветром допускается только при ограниченной скорости ветра (до 10 м/сек).
Г л а в а 2
РЕЖИМ ВЕРТИКАЛЬНОГО НАБОРА ВЫСОТЫ
§ 1. Схема сил, условия выполнения и избыток мощности для вертикального набора высоты
Силы и моменты, действующие на вертолет при вертикальном наборе высоты, те же, что и при висении (рис.
11.1). Однако подъемная сила несущего винта Y должна быть больше веса вертолета G (рис. 11.5) на величину Q Bp .
46
Y=G+Qвр
где QBp — лобовое сопротивление фюзеляжа при обдуве сверху.
Мощность, потребная для висения, с увеличением высоты возрастает (рис. 11.2). При вертикальном наборе высоты несущий винт должен создавать подъемную силу большую, чем при висении. Поэтому для выполнения режима вертикального набора высоты необходимо на каждой высоте иметь мощность большую, чем на режиме висения.
Превышение мощности, идущей на вертикальный набор высоты, над мощностью, потребной для висения, называется
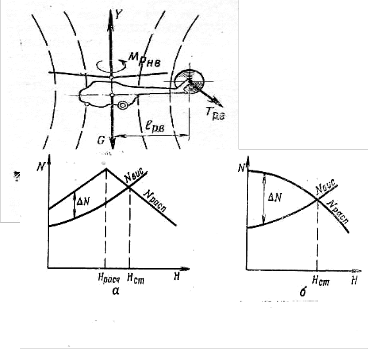
избытком мощности. Если избыток мощности равен нулю, то вертолет висит, если же избыток мощности больше нуля, то вертолет перемещается вверх, Избыток мощности затрачивается на вертикальное перемещение вертолета и чем он больше, тем интенсивнее подъем.
Рис 11.5. Схема сил при вертикальном наборе высоты.
Для определения максимально возможного избытка мощности необходимо взять располагаемую мощность двигателя и вычесть из нее мощность, потребную для висения:
N = Nрасп — NBис .
С поднятием на высоту располагаемая мощность двигателя изменяется согласно высотной характеристике двигателя. На рис. 11.6 показаны кривые располагаемых и потребных мощностей для вертолетов с поршневым (а) и
Рис. 11.6- Изменение избытка мощности по высоте:
а — для вертолета с поршневым двигателем; б — для вертолета с Т В Д.
турбовинтовым (б) двигателями. Из график ов в идно , ч то и з быт ок мо щн ос ти и зме н яе тся с поднятием на высоту.
Высота, на которой избыток мощности равен нулю,
называется ст ат и ч е ск и м потолком Нст . Иначе, ста-
тическим потолком вертолета называется та максималь-
ная высота, которую вертолет может достичь при вер-
тикальном наборе.
С увеличением веса вертолета и повышением темпе- ратуры воздуха статический потолок уменьшается из-за роста потребной мощности висения.
§ 2. Вертикальная скорость набора высоты
Избыток мощности AN при вертикальном наборе затрачивается на вертикальное перемещение вертолета
47
ном наборе высоты для вертолета с поршневым двигателем а и для вертолета с турбовинтовым двигателем б. Так как при вертикальном наборе избыток мощности невелик, то максимальные вертикальные скорости оказываются небольшими. Режим вертикального набора высоты является невыгодным из-за малой скорости набора высоты и малого статического потолка вертолетов. Кроме того, при вертикальном наборе высоты устойчивость вертолета плохая, вследствие чего значительно усложняется его пилотирование на этом режиме. Движения ручкой управления должны быть особенно точными и соразмерными для предупреждения стремления вертолета сместиться в какую-либо сторону. Поэтому основным режимом набора высоты является набор высоты с поступательной скоростью. Однако вертикальный набор высоты может быть использован при наличии препятствий. Следует заметить, что для кон- кретного вертолета вертикальная скорость набора значительно зависит от веса вертолета. Вертолет может быть так сильно загружен, что вертикальный набор будет вообще невозможен.
Г ла в а 3
РЕЖИМ ВЕРТИКАЛЬНОГО СНИЖЕНИЯ
§ 1. Схема сил и условия выполнения вертикального снижения
Силы и моменты, действующие на вертолет при верт ика л ь но м с ниж е нии , т е ж е , ч т о и п р и в ис е н и и (рис. II.1), но подъемная сила меньше, чем сила веса (рис. 11.8). При постоянной скорости снижения Y = G — QBP , где Qвр — лобовое сопротивление при обдуве снизу.
Для выполнения вертикального снижения необходимо уменьшить общий шаг несущего винта, при этом соответственно уменьшатся подъемная сила и мощность, потребляемая винтом. Уменьшение мощности, подводимой к винту, уменьшает и реактивный момент винта, поэтому уменьшается потребная тяга хвостового винта. Одновременно с уменьшением общего шага несущего винта дается левая нога.
Величина вертикальной скорости снижения зависит от степени
уменьшения общего шага, т. е. от степени дросселирования двигателя.
Рис. 11.8. Схема сил при вертикальном снижении..
§ 2. Образование вихревого кольца при вертикальном снижении
Особенностью вертикального снижения является возможность образования вихревого кольца. Причина образования вихревого кольца заключается в следующем. При вращении винта воздух отбрасывается вниз и взаимодействует с воздухом, притекающим снизу при снижении вертолета.
48
Притекающий воздух подтормаживается под винтом, огибает ометаемую поверхность и сразу же подсасывается винтом сверху (рис. 11.9). Таким образом, по границам ометаемой поверхности образуется
циркуляция воздуха — так называемое вихревое кольцо. Наибольшей интенсивности вихревое кольцо достигает при скоростях снижения V у = 5-:-7 м/сек. При больших скоростях снижения и переводе винта на малый шаг винт входит в режим самовращения и вихревое кольцо прекращается, так как весь воздух, притекающий снизу, проходит через винт.
Режим вихревого кольца сопровождается тряской вертолета, падением тяги и ухудшением управляемости причем,
чем больше интенсивность вихревого кольца, тем больше тряска вертолета. Для вывода из этого опасного режима необходимо перевести его в режим самовращения несущего винта, а затем плавным отклонением ручки управления от себя перевести вертолет в поступательный полет. Во избежание вихревого кольца вертикальное снижение допускается с малыми вертикальными скоростями (Vу не более 3 м/сек).
При вертикальном снижении устойчивость вертолёта плохая, пилотирование вертолета на этом режиме значительно затруднено. Усугубляет трудности в пилотировании и тряска, которой сопровождается вертикальное снижение с работающим двигателем.
Все перечисленные явления делают режим вертикального снижения невыгодным, поэтому основным режимом
снижения является режим наклонного снижения, в котором допускаются и большие вертикальные скорости, чем в режиме вертикального снижения. Однако режим вертикального снижения может быть использован в особых случаях при наличии препятствий.
49
Г л а в а 4
РЕЖИМ ГОРИЗОНТАЛЬНОГО ПОЛЕТА
§ 1. Балансировка вертолета в горизонтальном полете
Основные силы и моменты, действующие на вертолет в горизонтальном полете, показаны на рис. 11.10.
Рис.
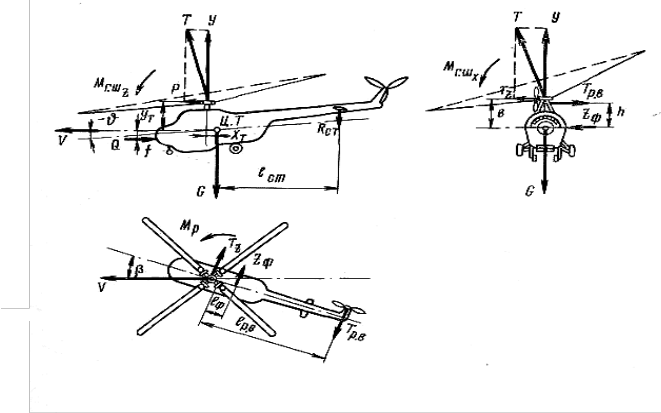
11.10. Схема сил и моментов, действующих на вертолет при горизонтальном полете
С и ла т я ги не суще го ви н та Т р аск ладывае т ся н а силу Р, обеспечивающую поступательный полет, подъемную силу Y и боковую силу Tz , силу лобового сопротивления Q, силу тяги рулевого винта Тр .в , аэродинамическую силу стабилизатора R ст , боковую силу фюзеляжа Zф, реактивный момент несущего винта М р и моменты осевых сил лопастей, вызванные разносом горизонтальных шарниров МГ.Ш х и МГШz
Условиями горизонтального полета являются:
1. Y=G — условие постоянства высоты;
2. P = Q — условие постоянства скорости;
3. TРВ = Tz +Zф — условие отсутствия сноса;
4. РУ Т + МГШ z + Qf= YxT + R CТ Lст— условие отсутствия поворота относительно поперечной оси;
5. TРВ h = Tz b + M Г.Шx — условие отсутствия поворота относительно продольной оси;
6. М Р + ZфLф = TРВ Lр.в — условие отсутствия поворота относительно вертикальной оси.
Сила Zф — боковая составляющая сопротивления фюзе ля жа верт о лета (пр и по лете со ско ль жен ием). При отсутствии Zф вертолет будет сносить влево. Для получения силы Zф горизонтальный полет совершается со скольжением влево.
Можно летать и без ско льжения влево , однако в этом случае для устранения сноса влево полет совершается с креном вправо. Здесь необходимая боковая сила G 2 есть составляющая веса G (рис. 11.11).
50
Как правило, в поступательном полете снос ликвидируется одновременным наличием крена и скольжения.
Для увеличения скорости горизонтального полета необходим рост силы Р (рис. 11.10), который получается вследствие
увеличения наклона плоскости вращения несущего винта вперед. Рост скорости вызывает и увеличение силы Q.
Рис. 11.12. Изменение угла тангажа от скорости полета
В результате растет суммарный пикирующий момент, действующий на вертолет:
Мпик = РуТ + Qf.
Сертолет начинает опускать нос, уменьшая угол тангажа v. Уменьшение угла тангажа вызывает рост силы R СТ и рост плеча х т , в результате чего начинает возрастать кабрирующий момент
Мкаб=Yхт +RстLст
который уравновешивает пикирующий.
Таким образом, с увеличением скорости угол тангажа уменьшается (рис. 11.12). На угол тангажа сильно влияет центровка. При более задней центровке
угол тангажа относительно возрастает.
Nдв .
§ 2. Потребная мощность для горизонтального полета
Потребная мощность для горизонтального полета складывается из индуктивной мощности NИНД , профильной мощности Nпр и мощности движения
Индуктивная м о щ н о с ть — это мощность, идущая для создания подъемной силы.
Как было показано ранее, индуктивная скорость в поступательном полете меньше, чем при висении, и с увеличением скорости полета падает, а с увеличением высоты возрастает. Аналогично изменяется и индуктивная мощность. График зависимости индуктивной мощности от скорости и высоты полета показан на
рис. 11.13.
Профильная м о щ но с ть — это мощность, идущая для преодоления сил сопротивления вращению.
Рис. 11.13. Зависимость
индуктивной мощности от скорости и высоты полета
51
От высоты полета профильная мощность практически не зависит.
Мощность д в иж е н ия —это мощность, затрачиваемая на поступательное перемещение вертолета:
С увеличением высоты полета кривая потребной мощности на малых скоростях сдвигается вверх из-за влияния
N ИНД , а на больших скоростях сдвигается вниз в результате влияния NДВ (рис. 11.17).
52
§ 6. Ограничение максимальной скорости горизонтального полета
При работе несущего винта в условиях косой обдувки угол атаки лопасти в азимуте 270° больше, чем в других азимутах.
С увеличением скорости полета в азимуте 270° возрастает скорость взмаха вниз, в результате угол атаки с
увеличением скорости возрастает.
скорость горизонтального полета.
Рис. 11.25. Распространение зоны срыва потока
Поэтому при определенной скорости начинается срыв потока, что приводит к вибрациям и крену вертолета. При дальнейшем увеличении скорости зона срыва распространяется на большие участки несущей поверхности (рис. 11.25). Падает подъемная сила, вертолет теряет устойчивость и управляемость и начинает совершать беспорядочные движения. Срыв потока
V=220 км/час V=240км/час
V=250км/час ограничивает максимальную
К срыву потока может привести и уменьшение оборотов несущего винта, ибо и в этом случае угол атаки возрастает (рис. 1,1.26). Поэтому, чем больше число m полета (m = — ), тем больше угол атаки лопасти в азимуте 270° и тем больше вероятность срыва потока.
С увеличением веса полет приходится совершать на большем шаге, поэтому срыв потока будет возникать раньше. На рис. 11.27 показано ограничение шага по срыву потока в зависимости; от числа m.
С увеличением высоты полет совершается на большем шаге, поэтому и срыв потока возникает на меньшей скорости полета. К срыву могут привести также вертикальные потоки в облаках или проваливание вертолета при чрезмерном уменьшении скорости на высотах более статического потолка.
Как вертикальные потоки, так и проваливание приводят к дополнительному обдуву винта снизу, что увеличивает угол атаки лопасти и способствует срыву потока.
Появление срыва потока не опасно для вертолета, так как летчик может легко его прекратить уменьшением шага винта и скорости полета.
§ 7. Пути увеличения максимальной скорости горизонтального полета
Увеличение скорости горизонтального полета вертолетов является одной из актуальнейших задач вертолетостроения, так как повышение скорости положительно сказывается и на экономичности перевозок, и на дальности полета, и на повышении тактических возможностей вертолета. Максимальные скорости современных вертолетов находятся в пределах 170—300 км/час.
Основной причиной, ограничивающей скорость полета, является возникновение зоны срыва потока в азимуте
270°.
При данной конструкции несущего винта срыв потока наступает при вполне определенном числе m, обычно при m =
0,27-:-0,35. Если увеличить обороты (угловую скорость со), то срыв возникает при боль-
53
шей скорости V.
Однако увеличение оборотов приводит к увеличению скорости обдува лопасти в азимуте 90°, где окружная скорость суммируется со скоростью полета W = wR + V. В результате в этом азимуте начинает проявляться сжимаемость воздуха, резко уве- личивается лобовое сопротивление лопасти, что приводит к сильной тряске и делает полет невозможным.
Таким образом, увеличивая обороты несущего винта для увеличения скорости начала срыва потока в азимуте 270°, можно попасть в условия волнового кризиса в азимуте 90°. На рис. 11.28 показан способ выбора оптимальных оборотов для достижения максимально допустимой скорости полета. Сначала увеличение оборотов позволяет увеличить скорость полета, ибо ограничения по срыву отодвигаются в зону больших скоростей, но после достижения определенных оборотов допустимая скорость начинает уменьшаться из-за ограничивающего влияния волнового кризиса. Точка пересечения линий ограничения дает оптимальные обороты «опт, на которых при данной конструкции винта можно достичь максимальной скорости.
Выбор оптимального числа оборотов дает лишь возможность наиболее рационально (с точки зрения достижения наибольшей скорости полета) использовать данную
конструкцию несущего винта. Но существуют также и специальные способы, при помощи которых можно ощутимо увеличить скорость полета. Эти способы можно
разбить на две группы. Во-первых, способы, позволяющие совершать полет на меньшем шаге несущего винта, и, во-
вторых, способы, связанные с совершенствованием конструкции несущего винта. Рассмотрим некоторые из них.
Для возможности выполнения горизонтального полета на меньшем шаге несущего винта можно применить следующее:
Уменьше ние в р е д н о г о с о п р о т и в л е н и я . У современных вертолетов еще очень велико вредное сопротивление. С увеличением скорости полета влияние вредного сопротивления будет сказываться еще существенней. Уменьшение вредного сопротивления при неизменной подъемной силе Y приводит к уменьшению силы тяги несущего винта Т, ибо для полета с данной скоростью требуется меньшая сила Р (рис. 11.10). Уменьшение потребной силы Т
позволит уменьшить шаг, а значит, и угол атаки лопасти, поэтому срыв потока оттягивается на большие скорости полета.
Пути уменьшения вредного сопротивления могут быть такие: улучшение аэродинамической формы фюзеляжа, применение убирающегося шасси и установка обтекателя на втулку несущего винта. При наличии обтекателя не только значительно уменьшается собственное сопротивление втулки, но и уменьшается неблагоприятная интерференция (взаимовлияние) между потоками у втулки и фюзеляжа, что снижает общую величину вредного сопротивления.
П р им енение д о п о л н и т е л ь н ы х движителей. Если на вертолете наряду с несущим винтом применить дополнительные движители (например, тянущие или толкающие винты или ТРД), то это приведет к возможности уменьшения силы Р, а следовательно, силы тяги несущего винта Т и потребных углов атаки лопастей несущего винта. Это также (как и при уменьшении вредного сопротивления) будет способствовать увеличению допустимой скорости полета за счет оттягивания начала срыва потока на большие скорости.
П рим ен ен ие к ры л а . У с т а но в ка на в е рт ол е т е крыла дает возможность частично разгрузить несущий винт от силы Y в горизонтальном полете. В результате появляется возможность уменьшить шаг несущего винта и ,
следовательно , оттян уть ср ыв потока с лопасти в сторону больших скоростей полета.
Применение большого крыла нерационально, так как при чрезмерной разгрузке несущего винта допустимая скорость ограничивается не срывом в азимуте 270°, а волновым кризисом в азимуте 90°. Поэтому применяют небольшое крыло (рис. 11.29), разгружающее несущий винт от подъемной силы на 20—25%. Но и это дает ощутимый прирост
максимальной скорости полета (до 30%) Следует заметить, что применение крыла и дополнительных движителей одновременно может повысить скор ос ть в е р тол е та д о 400—450 км/час, что и осуществляется на винтокрылах.
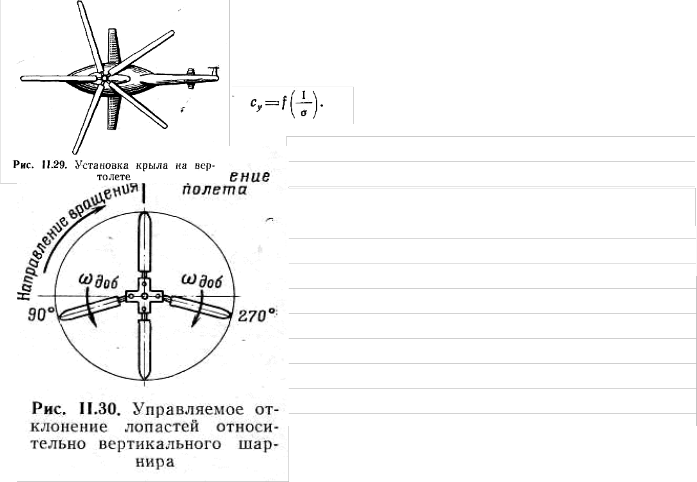
Совершенствование конструкции несущих винтов может идти по следующим путям.
У в е ли че н и е к о э ф ф и ц и е н т а з а пол не ния . Коэффициент заполнения а равен отношению суммы площадей лопастей несущего винта к
ометаемой площади. Расчеты показывают, что средняя по диску величина коэффициента подъемной силы су обратно пропорциональна величине коэффициента заполнения
Таким образом, увеличение коэффициента заполнения уменьшает среднюю величину коэффициента подъемной силы, а это приводит к тому, что граница срыва потока на лопасти смещается в сторону больших ско- ростей полета (до 350—370 км/час), ибо достижение Cу mах соответствующее срыву, наступает позже.
Повысить коэффициент заполнения можно как увеличением площади лопастей, так и увеличением числа лопастей. У современных вертолетов встречаются винты с шестью и более лопастями.
Отрицательной стороной этого способа является то, что увеличение коэффициента заполнения ведет к снижению КПД винта, т. е. для создания одной и той же тяги приходится затрачивать большую мощность двигателя.
Снижение КПД винта объясняется тем, что при увеличении коэффициента заполнения обтекание лопастей ухудшается, так как каждая лопасть работает в более завихренной зоне спутной струи предыдущей лопасти.
У пр ав л я ем о е отклоне н ие л о п ас т ей о тн о си - те л ь но в ер ти к ал ь н о г о ша р нир а . Если при поступательном полете осуществить дополнительное отклонение лопасти относительно вертикального шарнира в азимуте 90° назад по вращению, а в азимуте
270° впере д п о вращению (р ис. 11.30), то этим можно уменьшить асимметричность обтекания лопастей потоком. В результате уменьшится скорость обтекания лопасти в азимуте 90° и волновой кризис сместится на большие скорости полета. В азимуте 270° срыв потока наступит также
5
значительно позже из-за уменьшения скорости махового движения.
Расчеты показывают, что при данном способе можно значительно повысить скорость вертолета. Недостатком этого
метода является усложнение втулки несущего винта.
Существуют и другие способы увеличения максимальной скорости вертолета, часть из которых сводится к превращению вертолета в поступательном полете в самолет уборкой лопастей несущего винта или поворотом винтов вместе с крылом (конвертопланы).
§ 8. Устойчивость в горизонтальном полете
Рассмотрим сначала статическую устойчивость вертолета в горизонтальном полете. Статическая устойчивость складывается из устойчивости несущего винта и
устойчивости фюзеляжа со стабилизатором. В свою очередь каждый из перечисленных агрегатов обладает разной
статической устойчивостью по скорости и по углу атаки.

Если, например, полет происходит с постоянной скоростью и какая-либо причина привела к увеличению угла атаки несущего винта, то увеличится степень маховых движений лопастей. В результате плоскость вращения несущего винта отклонится назад, а это приведет к увеличению угла тангажа фюзеляжа, наклону вала несущего винта, а значит, и к большему увеличению угла атаки несущего винта. Таким образом, несущий винт по углу атаки неустойчив.
Если, например, увеличивается скорость полета, то вследствие увеличения степени маховых движений лопастей плоскость вращения несущего винта отклоняется несколько назад, что уменьшает силу Р несущего винта (рис. 11.31), а следовательно, и скорость полета. Таким образом, несущий винт обладает статической устойчивостью по скорости.
Фюзеляж вертолета со стабилизатором обладает статической устойчивостью по углу атаки. Так, если увеличится угол тангажа на v, то на стабилизаторе появится дополнительная сила AR СТ , вызывающая пикир у ющи й мо ме нт , ко т о рый
у мен ь ши т у го л т ан гажа (рис. 11.32).
Если же увеличить скорость полета, то возрастет пикирующий момент силы Q, который приводит к опусканию носа
вертолета, а значит, и к увеличению силы Р несущего винта (рис. 11.33). В результате скорость будет еще больше увеличиваться, значит, фюзеляж неустойчив по скорости.
Вообще степень устойчивости фюзеляжа по скорости зависит от точки приложения результирующей силы лобового сопротивления Q. Если сила Q приложена ниже центра тяжести (что бывает чаще), то фюзеляж неустойчив по скорости, если выше, то устойчив, и, наконец, если сила Q приложена в. центре тяжести, то фюзеля ж нейтрален. Р улевой винт практически не влияет на продольную статическую устойчивость.
Из рассмотренных примеров видно, что влияние различных агрегатов на статическую устойчивость различно.
На продольную статическую устойчивость вертолета по углу атаки положительно влияет фюзеляж со стабилизатором, отрицательно — несущий винт.
Практика показывает, что влияние несущего винта на статическую устойчивость по углу атаки, как правило, менее значительно, чем влияние фюзеляжа со стабилизатором, поэтому вертолет оказывается устойчивым по углу
атаки.
На продольную статическую устойчивость вертолета по скорости положительно влияет несущий винт и отрицательно
— фюзеляж.
55
Степень влияния различных агрегатов на устойчивость вертолета по скорости зависит от величины самой скорости полета. На малых скоростях вертолет устойчив, на средних — нейтрален или неустойчив, и на больших скоростях он снова становится устойчивым. Степень устойчивости по скорости увеличивается с уменьшением оборотов несущего винта, так как с уменьшением обо- ротов увеличивается степень маховых движений лопастей.
Рис. 11.33. Зависимость статической устойчивости фюзеляжа от скорости
Центровка мало влияет на продольную статическую устойчивость в горизонтальном
полете.
В динамическом отношении картина выглядит так: на тех режимах, где вертолет статически устойчив, появляются слабые незатухающие колебания, ибо вертолет в продольном отношении имеет малую динамическую неустойчивость. Колебания эти легко парируются летчиком. В боковом отношении вертолет динамически неустойчив.
Для облегчения пилотирования вертолета на нем устанавливается автопилот, который гасит колебания вертолета, связанные с динамической неустойчивостью.
§ 9. Управляемость в горизонтальном полете
В реальных условиях продольная, поперечная и путевая управляемость тесно связаны. Но для удобства изучения рассмотрим их отдельно.
П р о д о л ь н а я у п р а в л я ем о ст ь . Для увеличения скорости полета необходимо обеспечить рост силы Р
(рис. 11.10), который достигается путем наклона плоскости вращения несущего винта вперед (ручка от себя).
При нейтральном положении ручки кольцо автомата перекоса конструктивно устанавливается наклоненным вперед на 2—3°, в результате чего на крейсерских режимах отклонение ручки от нейтрального положения невелико, что облегчает пилотирование вертолета на крейсерских скоростях. Наименьший запас продольного управления от себя имеет место при полете на больших скоростях с предельно задней центровкой. Этот запас еще более уменьшается при уменьшении оборотов несущего винта, ибо с уменьшением оборотов растут маховые движения лопастей и для компенсации завала плоскости вращения необходима дополнительная подача ручки от себя.
При превышении предельно задней центровки может вообще не хватить хода ручки, а следовательно, и наклона автомата перекоса для достижения максимальной' скорости горизонтального полета.
П о п ер еч н ая у пр ав л я е м о сть . Для одновинтового вертолета характерна ассиметрия поперечного управления, которая объясняется следующим.
Для балансировки вертолета в поперечном отношении на режиме висения необходимо наличие силы Tz (рис. II.1), которая уравновешивает тягу рулевого винта Т РВ . При поступательном полете необходимость в силе Тг не отпадает (рис.
11.10).
При висении сила Т г получается за счет наклона ручки вправо. При горизонтальном полете вследствие маховых движений лопастей плоскость вращения заваливается назад и вправо. Степень завала зависит от скорости полета. На
больших скоростях завал оказывается настолько эффективным, что ручку управления приходится перемещать влево.
Таким образом, с увеличением скорости полета ручк а уп р авления до лжн а пере мещать ся спр ава н але во. В
этом и проявляется асимметрия поперечного управления.
При нейтральном положении ручки кольцо автомата перекоса конструктивно устанавливается наклоненным влево
на 1—2°, поэтому на крейсерском режиме не требуется отклонения ручки, что облегчает пилотирование вертолета.
Наименьший запас поперечного управления влево имеет место в горизонтальном полете при максимальной скорости полета и при асимметричной загрузке вертолета на правый борт. Запас поперечного управления вправо в горизонтальном полете невелик, и его можно не учитывать.
П у т ев ая у п р а в л я ем о ст ь . Н а в с е х с корос т ях горизонтального полета требуется расход правой педали. На малых скоростях расход правой педали большой, на крейсерских скоростях педали находятся почти нейтрально, а на больших скоростях снова появляется необходимость в расходе правой педали. Расход правой педали на больших скоростях может быть уменьшен, если вертолет имеет киль с фиксированным рулем (рис. 11.20). При поступательном полете запас путевого управления вправо, несмотря на скольжение влево, значительно больше, чем при висении.
Изменение продольной центровки практически не сказывается на поперечной и путевой управляемости вертолета. Таким образом, для перевода вертолета из. режима висения в горизонтальный полет и набора нужной скорости ручка
управления подается вперед и влево и одновременно убирается правая педаль, Ручка «шаг — газ» сначала опускается (до
экономической скорости), а затем снова подымается.
§ 6. Вертикальная скорость при планировании на режиме самовращения
Вертикальная скорость снижения на режиме самовращения зависит в основном от скорости поступательного полета, ибо шаг винта практически остается постоянным и близким к минимальному значению. Зависимость вертикальной скорости снижения от скорости полета и шага приводится в указательнице глиссад планирования (рис. 11.54).
В связи с тем что на высотах ниже 2000м самовращение осуществляется практически при неизменном минимальном шаге Фmin=l—3°, на рис. 11.54 приводится одна кривая.
Из графика видно, что при вертикальном снижении вертикальная скорость доходит до 15—18 м/сек, поэтому этот
режим снижения опасен при посадке. По графику можно определить скорость полета V1, при которой вертикальная
скорость минимальна Vуmin . V современных вертолетов Vуmin = 7-:-9 м/сек.
56
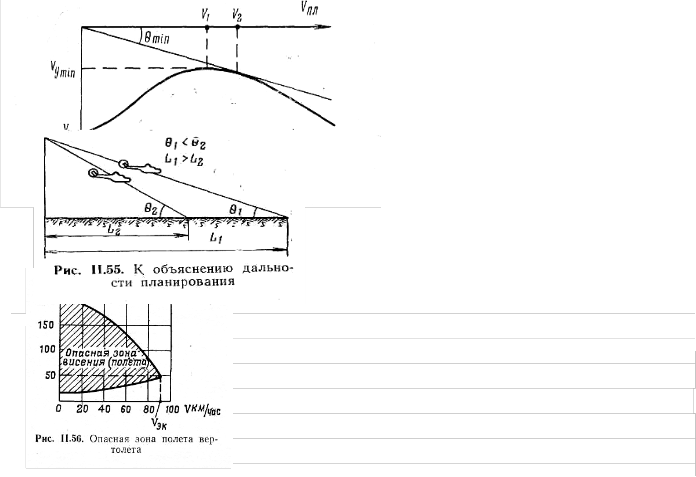
Рис. 11.54. Указательница глиссад планирования на режиме самовращения
Касательная к кривой, проведенная ,из начала координат, дает скорость V 2 , при которой угол планирования минимальный О min . Вертикальная скорость, соответствующая ©min, несколько больше минимальной, но зато на этой скорости достигается максимальная дальность планирования
(рис. 11.55).
§ 7. Опасная зона полета вертолета
Для совершения безопасной посадки на режиме самовращения необходимо, чтобы вертикальная скорость сни жения была близка
к минимальной. И з. графика (рис 11.54) видно, что это получается при поступательной скорости, когда V 1 =V эк (для современных вертолетов V ЭК =90-:-150 км/час).
В случае остановки двигателя в полете для ввода винта в режим самовращения и последующего разгона до V ЭК (если полет совершался на меньшей скорости)
требуется время, в течение которого происходит быстрая потеря высоты. Поэтому
летчик должен избегать полета в опасной зоне высот и скоростей (рис. 11.56).
Для обеспечения безопасной посадки в случае остановки двигателя на режиме висения необходимо высоту висения выбирать или ниже 10м, или выше
200м. В случае остановки двигателя на высотах менее 10м вертолет при спуске не
успевает развить вертикальну ю с корос т ь б о л е е 4 м/сек, поэтому посадка происходит без поломок. При остановке двигателя на высотах более 200м летчик
располагает временем, необходимым для ввода винта в режим самовращения и разгона вертолета до скорости, при которой можно совершить безопасную посадку. Из графика видно, что с увеличением скорости полета диапазон опасных высот уменьшается, так как вертолет в данном случае обладает определенным запасом кинетической энергии, что облегчает ввод винта в режим самовращения и разгон вертолета до безопасных скоростей планирования. При скоростях полета, близких или превышающих V ЭK , опасной зоны высот с точки зрения рассмотренных положений не существует, так как при отказе двигателя на этих скоростях вертолет сразу оказывается в условиях безопасного снижения.
Несмотря на это, полет на малых высотах (до 20 м) даже на больших скоростях опасен, потому что в случае отказа
двигателя в распоряжении летчика оказывается слишком мало времени на выбор подходящей площадки для безопасного приземления.
§ 8. Особенность перехода одновинтового вертолета с моторного режима на режим самовращения
В случае остановки двигателя нарушается балансировка вертолета. Вертолет опускает нос, разворачивается и кренится вправо.
Опускание носа вертолета происходит за счет изменения направления обтекания фюзеляжа, так как увеличение
обдува снизу стабилизатора и хвостовой балки приводит к появлению пикирующего момента. Опусканию носа способствует также уменьшение шага несущего винта, необходимое для перехода на режим самовращения.
С уменьшением шага уменьшаются маховые движения лопастей и уменьшается завал плоскости вращения назад. В моторном полете значительный завал плоскости вращения несущего винта компенсируется необходимым отклонением ручки управления вперед, поэтому при уменьшении шага, если ручку управления оставить неподвижно, плоскость вращения отклонится вперед, что вызовет нарушение балансировки и наклон вертолета вперед. В связи с тем что уменьшение шага при вводе в режим самовращения производится быстро, вертолет при этом имеет тенденцию к резкому опусканию носа.
При остановке двигателя исчезает реактивный момент несущего винта. Поэтому если не изменить направление тяги рулевого винта, то вертолет будет разворачиваться вправо. Развороту вертолета в сторону вращения несущего винта
(вправо) также способствует момент сопротивления трансмиссии.
Появление правого разворота сопровождается кренением вертолета вправо вследствие увеличения подъемной, силы лопастей в азимуте 90° (растет скорость обдува) и уменьшения подъемной силы в азимуте 270° (уменьшается скорость обдува).
Для парирования разворота вправо необходимо изменить направление тяги рулевого винта слева направо, но при этом крен вправо усугубляется.
Таким образом, при переходе с моторного полета на режим самовращения для компенсации тенденции вертолета опускать нос, крениться и разворачиваться вправо необходимо при уменьшении общего шага — ручку управления
брать на себя и влево и дать левую ногу.
В заключение следует отметить, что для облегчения продольной балансировки вертолета при переходном режиме с моторного полета на самовращение управление стабилизатором связано с управлением общего шага. При уменьшении общего шага угол установки стабилизатора уменьшается, что увеличивает его кабрирующий момент,
который уменьшает тенденцию вертолета к опусканию носа.
Г л а ва 8
ДАЛЬНОСТЬ И ПРОДОЛЖИТЕЛЬНОСТЬ ПОЛЕТА ВЕРТОЛЕТА
57
Дальностью по л ета называется длина пути, пройденного вертолетом с момента взлета до момента посадки. П р о д о л ж ител ь но ст ь ю по л е т а называется время, затраченное на полет от момента взлета до момента посадки.
Различают понятия технической, практической и тактической дальностей (продолжительности) полета.
Т е х н и ч е с к а я дальность (продолжительность) является соответственно дальностью (продолжительностью)
полета одиночного вертолета в безветрии при условии полной выработки горючего.
П рак т ич ес к а я д а л ь но с ть (продолжительность) меньше технической, так как при ее определении предусматривается гарантийный запас топлива в количестве 5—10% от полной заправки.
Т а к т и ч е с к а я д а л ь н о с т ь (продолжительность) — максимальная дальность (продолжительность)
полета, получаемая при выполнении тактического задания с учетом всех необходимых запасов топлива. Тактическая
дальность (продолжительность) полета меньше практической.
Иногда вместо дальности полета применяется понятие радиуса действия — наибольшее расстояние, пролетев которое, вертолет может возвратиться на аэродром вылета.
Дальность полета L слагается из расстояний, пройденных вертолетом при наборе высоты LH , в горизонтальном полете
LГ.П и при снижении LCH , т. е.
L= Lн+Lг.п+Lсн. Соответственно продолжительность полета Т будет равна Т= Тн+Тг. п +Тсн.
Дальность и продолжительность при наборе высоты и снижении приводятся в инструкции по расчету дальности и продолжительности полета конкретного вертолета.
§ 1. Определение дальности и продолжительности горизонтального полета
Для определения дальности горизонтального полета необходимо знать располагаемый запас топлива и расход его на один километр пути в безветрии
где V — воздушная скорость полета вертолета, км/час. Для определения запаса топ ли ва для горизонтального полета необходимо из полного запаса топлива перед вылетом вертолета вычесть:
G 3 — расход топлива на запуск, прогрев, пробу двигателя на земле и на руление; GH — расход топлива на взлет и
набор высоты; GCН — расход топлива на снижение и посадку; Gан — аэронавигационный запас топлива на случай изменения метеоусловий при выполнении полета. Обычно аэронавигационный запас принимается в количестве не
менее 5—10% от полного запаса топлива
Gт г.п=Gт полн. — G3 — GH — GCH — GАH
Дальность и продолжительность горизонтального полета при заданной нагрузке вертолета зависят от запаса топлива на вертолете и режима полета вертолета, который задается высотой, скоростью полета по прибору и числом оборотов несущего винта.
Для того чтобы получить наибольшую дальность и продолжительность полета, необходимо правильно выбрать режим полета вертолета.
РАЗДЕЛ III
НЕУСТАНОВИВШИЕСЯ РЕЖИМЫ ПОЛЕТА ВЕРТОЛЕТА


Г л а ва I
ВЗЛЕТ ВЕРТОЛЕТА
На вертолете возможны следующие виды взлета:
— отрыв по вертикали с последующим разгоном (взлет по-вертолетному);
— отрыв после разбега по земле (взлет по-самолетному).
Выбор способа взлета производится в зависимости от условия полета и загрузки вертолета.
Обычным для вертолета является взлет по-вертолетному. Он производится, когда запас мощности позволяет совершить отрыв от земли без разбега и висение вблизи земли. Если вертолет не может выполнить висение, необходимо взлетать no- самолетному или уменьшать взлетный вес.
Любой вид взлета производится, как правило, против ветра.
Перемещение легких вертолетов со стоянки на старт производится подлетом на высоте 3—5 м или рулением. Основным
видом перемещения средних и тяжелых вертолетов является руление по земле. Если из-за непригодности аэродрома
58
(площадки) руление невозможно, разрешается выполнять подлет на средних и тяжелых вертолетах.
§ 1. Руление вертолета
Движение вертолета по земле осуществляется наклоном тяги несущего винта вперед с помощью ручки циклического шага (ручки управления). Шаг винта и обороты устанавливаются вполне определенными, чтобы обеспечить достаточно большую горизонтальную составляющую силы тяги при сравнительно небольшой подъемной силе.
Все маневры при рулении осуществляются отклонением ручки управления и педалей, число оборотов и шаг винта не меняются. Скорость руления должна быть не более 10—20 км/час.
У вертолетов одновинтовой схемы при рулении имеется стремление крениться в сторону действия тяги рулевого винта, поэтому увеличение шага несущего винта свыше нормы может привести к опрокидыванию вертолета вследствие возрастания тяги рулевого винта.
При рулении по мягкому грунту сильно увеличенная тяга рулевого винта во время поступательного движения вертолета одновременно сдвигает его влево. При этом с внешней стороны левого колеса шасси на грунте образуется валик, препятствующий сдвигу вертолета, после чего под действием тяги рулевого винта вертолет начинает
крениться влево (рис. III.1). Расчеты показывают, что если тяга несущего винта будет близка по величине к весу вертолета, то при крене более 5Э отклонение, ручки управления вправо не приносит желаемого эффекта (крен не ликвидируется), ибо достаточного восстанавливающего момента не создается из-за уменьшения восстанавливающего момента силы веса вертолета относительно левого колеса Gа1<Gа2 -
Для прекращения крена в этом случае надо уменьшить шаг, чтобы уменьшить реактивный момент несущего винта и одновременно дать левую педаль для уменьшения силы Тр. в.
Опрокидывание вертолета возможно также при сильном боковом ветре во время руления, когда конус несущего винта отклоняется по ветру, образуя горизонтальную составляющую силу тяги.
Для вертолетов Ми-4 и Ми-6 опаснее ветер справа, ибо в этом случае кренящий момент, вызванный наклоном
конуса вращения, суммируется с кренящим моментом силы тяги рулевого винта.
При рулении по неровному грунту периодические толчки по колесам могут привести к раскачке вертолета на
шасси и, как следствие этого, к появлению земного резонанса.
Земной резонанс приводит к интенсивной раскачке вертолета с отрывом то левого, то правого колеса. При этом могут поломаться шасси, лопасти несущего винта задеть о землю, вертолет может опрокинуться.
Для прекращения земного резонанса необходимо выключить двигатель. Взлет после прекращения земного резонанса
без предварительного осмотра силовых узлов вертолета, шасси и лопастей не рекомендуется, так как вследствие резких поперечных колебаний лопасти несущего винта могут быть повреждены не только у концов, н о и у комля .
Уменьшение скорости на рулении производится плавным взятием ручки на себя и применением тормозов колес.
§ 2. Взлет по-вертолетному
Взлет по-вертолетному состоит из отрыва от земли, висения, вертикального набора высоты и разгона до скорости наибольшей скороподъемности (рис. 111.2).
Величина вертикального набора высоты определяется высотой препятствий, окружающих взлетную площадку.
Если препятствий нет, вертолет с висения переходит на разгон и выполняет его на малой высоте, чтобы использовать
эффект «воздушной подушки». При использовании эффекта «воздушной подушки» несущий винт создает большую тягу, чем облегчается взлет перегруженного вертолета.
Если имеется препятствие, то вес вертолета должен быть равен тяге, развиваемой несущим винтом вне зоны влияния земли, или меньше ее.
59
Рис. 111.2. Взлет по-вертолетному
Для отрыва вертолета от земли ручкой «шаг — газ»
увеличивается тяга несущего винта с таким расчетом, чтобы она несколько превысила вес вертолета. При этом
отклонением педалей вертолет удерживается от разворота. Перемещение в сторону после отрыва парируется отклонением ручки управления.
После набора высоты 1,5—2 м мощность двигателя уменьшается настолько, чтобы вертолет завис на этой высоте.
Разгон с режима висения производится горизонтально или с небольшим набором высоты.
§ 3. Взлет по-самолетному
Взлет по-самолетному состоит из разбега по земле, отрыва, разгона в зоне «воздушной подушки» и набора высоты
(рис. III.3).
Взлет с разбегом производится в тех случаях, когда вертолет сильно перегружен или винт не развивает необходимой тяги из-за высокой температуры воздуха или большой высоты площадки.
Разбег вертолета производится наклоном вперед тяги несущего винта и некоторым увеличением общего шага. По достижении скорости отрыва (30—50 км/час) дополнительно увеличивается шаг несущего винта и выполняется разгон на
малой высоте, так как ускоряющая сила при горизонтальном разгоне больше, чем при разгоне с набором высоты.
Из-за увеличения скорости, а следовательно, и тяги несущего винта при разгоне вертолет имеет тенденцию к набору высоты. Чтобы выдержать разгон на постоянной высоте, ручка управления в процессе разгона постепенно отклоняется от
себя и влево. По достижении экономической скорости вертолет переводится в набор высоты.
Г л а ва 2
ПОСАДКА ВЕРТОЛЕТА
На вертолете выполняются следующие виды посадок:
— посадка по-вертолетному;
— посадка по-самолетному;
— посадка на режиме самовращения несущего винта.
При выполнении всех видов посадок уменьшение вертикальной скорости снижения вертолета в момент приземления
приводит к уменьшению нагрузок, действующих на посадочные органы и силовые элементы конструкции вертолета, а уменьшение поступательной скорости— к сокращению длины пробега и, как следствие, к уменьшению потребных размеров посадочной площадки.
Практически уменьшение вертикальной и поступательной скорости на посадке производится отклонением ручки
управления на себя и увеличением общего шага несущего винта. При взятии ручки на себя происходит не только торможение вертолета вследствие наклона тяги несущего винта назад, но и уменьшение вертикальной скорости снижения из-за увеличения угла атаки винта.
На режиме самовращения кратковременное увеличение тяги несущего винта перед приземлением вертолета
производится увеличением шага винта. При этом обороты несущего винта уменьшаются, а кинетическая энергия вращения винта преобразуется в дополнительный прирост его тяги (см. § 3 настоящей главы). Для сокращения посадочной дистанции и облегчения пилотирования, посадка вертолета, как правило, производится против ветра.
§ I. Посадка по-вертолетному
Посадка по-вертолетному состоит из наклонного снижения, зависания, вертикального снижения и приземления
(рис. II 1.4). Этот вид посадки вертолета не требует специальной посадочной площадки.
60
Рис. 111.4. Посадка по-вертолетному
Наклонное снижение до высоты порядка 50м производится на наивыгоднейшей скорости, с высоты 50 м начинается торможение вертолета плавным взятием ручки управления на себя. На участке торможения произ- водится уточнение расчета посадки.
Если в непосредственной близости от места посадки нет препятствий, снижение заканчивается зависанием на высоте 1—3 м. Для этого примерно с высоты 3—5 м плавной дачей ручки «шаг — газ» увеличивается тяга несущего
винта. Одновременно с увеличением тяги отклонением ручки управления и педалей парируется стремление вертолета крениться и разворачиваться влево из-за уменьшения завала конуса вращения и увеличения реактивного момента несущего винта.
После кратковременного зависания у земли вертолет с высоты 1—3 м переводится в режим вертикального
снижения с таким расчетом, чтобы в момент приземления вертикальная скорость была 0,1—0,2 м/сек. Стремление вертолета к развороту при уменьшении общего шага винта парируется отклонением педалей. Боковые перемещения вертолета .при посадке не допускаются. После приземления шаг несущего винта устанавливается минимальным.
При наличии на месте посадки препятствий, которые не допускают снижения вертолета до высоты 1—3 м, за- висание перед посадкой производится на 3—5 м выше препятствий. Вертикальное снижение из-за опасности по- падания в режим вихревого кольца производится с вертикальной скоростью не более 2—3 м/сек.
§ 2. Посадка по-самолетному
Посадка по-самолетному состоит из планирования, выравнивания, выдерживания, приземления и пробега (рис.

111.5). Такая посадка производится в случаях, когда вертикальная посадка невозможна из-за большого веса вертолета, большой высоты посадочной площадки и высокой температуры воздуха.
Рис. 111.5. Посадка по-самолетному
П л а ниро в а ние в е р т о л е т а на по с ад к у д о в ы со т ы 3—8 м выполняется на наивыгоднейшей скорости, после чего плавным взятием ручки управления на себя вертолет выравнивается — переводится в горизонтальный полет на малой высоте.
Выдерживание представляет замедленное движение вертолета на высоте 0,5—1 м, в процессе которого по-
ступательная скорость уменьшается до посадочной Vпос = 20 -50км/ч. Уменьшение тяги несущего винта
при выдерживании происходит из-за уменьшения скорости полета вертолета; рычаг «шаг — газ» на выдерживании не перемещается.
После приземления на основные колеса шаг несущего винта уменьшается до минимального и вертолет опускается на передние колеса. Для уменьшения длины пробега применяется торможение колес.
§ 3. Посадка на режиме самовращения несущего винта
В случае отказа двигателя возможна безопасная посадка благодаря способности несущего винта переходить на режим самовращения.
Посадка на режиме самовращения несущего винта обычно выполняется с пробегом и состоит из планирования, выравнивания, приземления и пробега.
Траектория планирования выбирается в зависимости от расстояния до выбранной площадки. Каждому наклону траектории соответствует своя скорость планирования, которая может меняться в больших пределах, при условии сохранения оборотов несущего винта. На высоте 20—35 м начинается плавное отклонение на себя ручки управления и в результате увеличения угла атаки не сущего винтаА2>А1возрастает тяга.
На рисунке III.6 показано сечение лопасти несущего винта в азимуте 90° (в других азимутах картина явления будет аналогичной), откуда видно, что угол атаки лопасти а зависит от угла атаки несущего винта А. При ЭТОМ С увеличением А увеличивается а, а следовательно, и тяга несущего винта. Так как увеличение тяги происходит путем взятия ручки на себя, то уменьшается ее составляющая Р.
Вертолет при этом уменьшает скорость. С падением скорости уменьшается угол атаки лопасти а3<а2 (рис. III.6) и снова снижается тяга винта Т.
61
Поэтому, чтобы поддержать тягу на повышенном уровне, необходимо снова увеличить угол атаки несущего винта А.
Таким образом, при постепенном взятии ручки на себя, т. е. при плавном увеличении угла. А, можно поддерживать повышенную тягу несущего винта. При этом скорость полета будет все время уменьшаться. В данном случае поддержание
повышенной тяги происходит вследствие уменьшения кинетической энергии вертолета. Поэтому, чтобы иметь достаточный запас кинетической энергии, вертолет должен планировать с большой скоростью.
При взятии ручки на себя вертолет начнет выходить из планирования. Через некоторое время на высоте 10—15 м плавным движением ручки «шаг — газ» увеличивается шаг, а следовательно, и тяга несущего винта. Увеличение шага будет
сопровождаться уменьшением оборотов несущего винта. Кратковременный рост тяги в этом случае получается за счет кинетической энергии вращения несущего винта. Поэтому важно правильно рассчитать начало и темп отклонения ручки
«шаг — газ», чтобы вертикальная скорость снижения к моменту приземления стала наименьшей.
Перед приземлением ручка управления дается от себя, чтобы уменьшить наклон вертолета и избежать касания
хвостовой опорой о землю.
После приземления винт переводится на минимальный шаг, чтобы не было резкого опускания лопастей и удара их о хвостовую балку при остановке винта.
В исключительных случаях, когда невозможна посадка с поступательной скоростью, посадку на режиме самовращения
можно совершить с вертикального снижения. В этом случае для гашения вертикальной скорости остается только энергия вращающегося винта. Увеличением общего шага винта при приближении к земле можно уменьшить вертикальную скорость. Однако вертикальная посадка не гарантирует вертолет от поломки.
Г л а в а 3
МАНЕВРИРОВАНИЕ ВЕРТОЛЕТА
§ 1. Вираж
Вираж — это разворот вертолета с креном. Может быть несколько разновидностей виража. В дальнейшем будет рассматриваться правильный вираж — полет вертолета в горизонтальной плоскости по замкнутой окружности с постоянной скоростью и постоянным углом крена. Вертолеты выполняют, как правило, мелкие виражи с углом крена меньше 45°.
Выше было рассмотрено, что в полете на вертолет действуют следующие основные силы: сила веса G, сила тяги
несущего винта Т и лобовое сопротивление QBp . Поскольку сумма моментов, действующих на вертолет, равна нулю, счи- таем силы приложения в центре тяжести вертолета. Разложим силу Т на подъ- емную силу Y и силу по траектории Р.
Для выполнения правильного виража вертолет должен быть накре- нен на- столько, чтобы равнодействующая сил Y и G лежала в горизонталь ной плоскости и была направлена к центру виража (рис. III.7). Равнодействующая R является центростремительной силой. Условием постоянства скорости полёта будет Р=Qвр.
§ 2. Спираль
Если выполнить вираж так, чтобы траектория движения вертолета не находилась в горизонтальной плоскости, получится спираль. Спираль может быть нисходящей или восходящей.
Выполнение нисходящей спирали возможно и в режиме самовращения
несущего винта. В этом случае необходимо учитывать меньшую эффективность органов управления вертолета и опасность раскрутки несущего винта выше допустимых оборотов.
§ 3. Развороты на месте
Вертолет может совершать развороты на месте, находясь в режиме висения.
Для исключения большой нагрузки на лопасти хвостового винта, хвостовую и концевую балки иногда устанавливаются ограничения на угловые скорости вращения вертолета,
Следует иметь в виду, что при левом развороте вертолет имеет тенденцию к набору высоты, при правом развороте —
к снижению. Это объясняется перераспределением мощности между несущим и рулевым винтами при отклонении педалей. Поэтому для поддержания постоянной высоты при развороте требуется соответствующее отклонение рычага «шаг
— газ».
Выполнение разворотов на висении у земли по технике пилотирования относится к сложному виду маневра.
§ 4. Перемещеиие в стороны
Перемещение вертолета в стороны или назад выполняется со скоростью не более 10-15 ILМ/час и осуществляется двойным отклонением ручки в соответствующую сторону (как и при полете вперед). Вертолет при движении в сторону имеет тенденцию развернуться в направлении полета под действием возникающей боковой аэродинамической силы. Эта тенденция парируется соответствуюrцим отклонением педалей.
Постоянная высота выдерживается изменением общего шага несущего винта. Запас высоты должен быть не менее 1-2 .м, так как касание колес о землю может привести к опрокидыванию вертолета.